TB6600 Stepper Motor Controller: Pinout, Arduino -Schnittstelle und wie es funktioniert
Katalog

Überblick über das TB6600 -Stepper -Motor -Treibermodul
Der TB6600 Das Stepper Motor Trivermodul ist ein Gerät, das sich durch seine Belastbarkeit und Anpassungsfähigkeit für die Steuerung von 2-Phasen-Schrittmotoren auszeichnet.Es verbindet sich nahtlos mit einer Vielzahl von Mikrocontrollern, hauptsächlich Arduino, und fördert die Schaffung genauer 5 -V -digitaler Pulsausgänge.Diese Ausgänge sind dynamisch für die Aufrechterhaltung des empfindlichen Gleichgewichts der Motorregelung.In einem Spannungsbereich von 9-42 V DC und der Unterstützung eines Spitzenstroms von 4 Ampere ist es eine vielseitige Wahl für verschiedene motorgesteuerte Projekte.Mit dieser Anpassungsfähigkeit können Sie die motorische Positionierung und Geschwindigkeit effizient verwalten, was für Anwendungen, die darauf abzielen, die Codierungskomplexität zu minimieren.Die Hochfrequenz-Optokoppler-Isolierung des Moduls verbessert seine Zuverlässigkeit erheblich, indem die Störungsrisiken reduziert und festgestellt werden.
Die Harmonie mit zahlreichen Mikrocontrollern macht den TB6600 -Treiber zu einer passenden Wahl für Projekte, die eine komplizierte Motorkontrolle erfordern.Es integriert reibungslos in Plattformen wie Arduino, was seine Fähigkeit widerspiegelt, verschiedene Erwartungen zu erfüllen.Beispielsweise ermöglicht die Verwendung dieses Treibers in CNC -Maschinen oder 3D -Druckern eine präzise und kontrollierte Bewegung, die den Nutzen in verschiedenen Feldern veranschaulicht.
Dieses Modul zeichnet sich durch seine Unterstützung sowohl für 2-Phasen- als auch für 4-Phasen-Steppermotoren sowie für Hybridkonfigurationen aus.Das Bipolar-H-Bridge-Design ist ein wesentlicher Bestandteil der effizienten Verwaltung von Spannung und Strom, um sicherzustellen, dass der Fahrer die Spitzenleistung in seinen Anwendungen liefert.In Umgebungen, in denen Präzision und Zuverlässigkeit priorisiert werden, wie z. B. automatisierte Produktionslinien und Robotik, werden diese Funktionen hoch geschätzt.
Merkmale
|
Besonderheit |
Beschreibung |
|
Treibertyp |
Bipolarer H-Bridge DC-Treiber |
|
Ausgabe aktuelle Optionen |
8 Typen (0,5a bis 3,5a), bis zu 4 Ampere ausgewählt werden |
|
Unterteilungsmodi |
Teilen Sie bis zu 32, wählbar in 6 Modi |
|
Mikroschrittoptionen |
8 Arten (1, 2/a, 2/b, 4, 8, 16, 32) |
|
Eingangssignalisolation |
Hochgeschwindigkeitsfoto-Trennung |
|
Schnittstelle |
Vollständige Standard -Einzelpulsschnittstelle |
|
Offline -Hold -Funktion |
Ja |
|
Umwelteigentum |
Semi-verkürzter Körper für harte Umgebungen |
|
Stromverriegelungsfunktion |
Halbautomatisch, energiesparend |
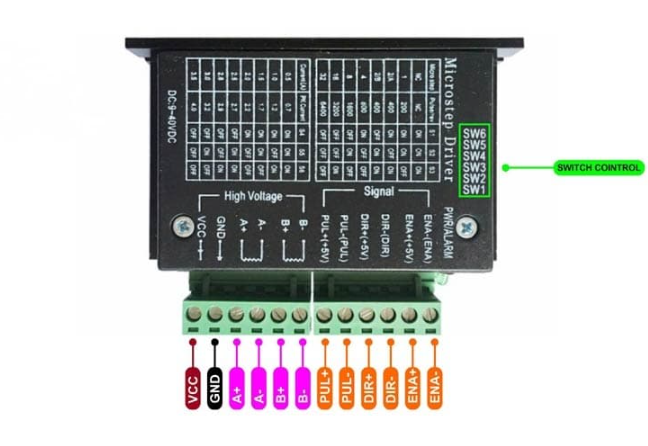
PIN -Konfiguration
Technische Spezifikationen
|
Spezifikation |
Details |
|
Betriebsspannung |
9-40 V DC |
|
Ausgangsstrom |
0,7a-4,0a (in 8 Schritten über Dip-Switches ausgewählt) |
|
Eingangsimpulsfrequenz |
Bis zu 20 kHz |
|
Eingangssignalpegel |
5 V Signalpegel |
|
Puls pro Revolution |
200-6400 |
|
Logiksignalstrom |
8A-15a |
|
Motorkompatibilität |
Geeignet für 2-Phasen- und 4-Phasen-Steppermotoren |
|
Schutzmerkmale |
Überstrom, Überhitzungsschutz |
|
Eingangsisolation |
Optisch isoliert |
|
Isolationsresistenz |
500 megogohm |
|
Unterstützter Modus |
Pul/FIR -Modus |
|
Kosten |
Niedrige Kosten |
H-Bridge-Schaltungskonfiguration für den TB6600
Das TB6600 Stepper Motor Trivermodul ist eine schwerwiegende Komponente, die sowohl 2-Phasen- als auch 4-Phasen-Steppermotoren steuert, wobei eine bi-polare H-Bridge-Konfiguration für einen effizienten Betrieb verwendet wird.Diese Konfiguration verwendet MOSFET -Transistoren, um eine hohe Leistung in Bezug auf die aktuelle Handhabung und die thermische Stabilität zu gewährleisten.Das Modul arbeitet durch Interaktion mit zwei primären Kontrollstiften: den Stiefstift, der den Motor mit jedem Impuls und den Richtstift auslöst, der die Drehrichtung des Motors basierend auf der angelegten Spannung bestimmt.Zusammen ermöglichen diese Eingänge eine präzise Steuerung über die Sprungsequenz des Motors und die Rotationsrichtung.
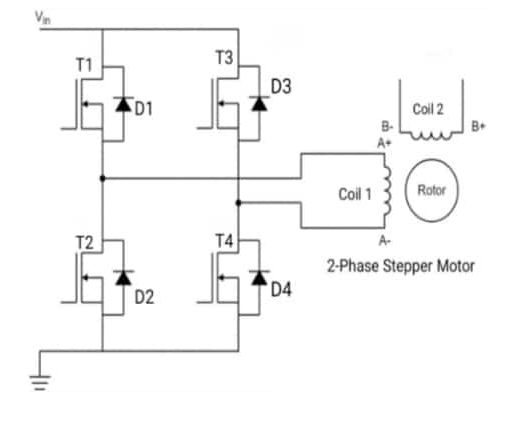
Das Schaltplan hebt vier Schlüsseltransistoren hervor, T1, T2, T3 und T4, die in einer H-Bridge-Struktur angeordnet sind.Diese MOSFETs sind das Rückgrat des Modulbetriebs und ermöglichen den bidirektionalen Strom, der zum Antrieb des Schrittmotors benötigt wird.Darüber hinaus enthält das Diagramm Flyback -Dioden (D1, D2, D3 und D4), die entscheidend zum Schutz der Schaltung vor Spannungsspitzen sind, die durch die induktive Last des Motors verursacht werden.Diese Dioden verhindern einen Überstrom und eine Beschädigung empfindlicher Komponenten während des Betriebs.Die A+, A-, B+und B-Klemmen werden verwendet, um den Motor zu verbinden und eine genaue und kontrollierte Bewegung der Motorwelle zu gewährleisten.
Wie ermöglicht die H-Bridge Motorrotation?
Der TB6600-Treiber arbeitet durch die koordinierte Wirkung der MOSFET-Transistoren in der H-Brücke.Zum Beispiel:
• Drehung im Uhrzeigersinn tritt auf, wenn Transistoren T1 und T4 aktiviert sind, wodurch der Stromfluss von A+ zu A- geleitet wird.
• Die Rotation gegen den Uhrzeigersinn tritt auf, wenn T2 und T3 eingebunden sind, wodurch der Stromfluss von a- nach A+umgekehrt wird.
Diese abwechselnde Aktivierung von Transistoren sorgt für eine reibungslose bidirektionale Bewegung.Um ein optimales Drehmoment und einen effizienten Betrieb zu erzielen, sind eine präzise Timing und die Spannungsregulierung von wesentlicher Bedeutung.
Betriebsmodi für vielseitige Kontrolle
Der TB6600 unterstützt je nach Anwendungsanforderungen vier verschiedene Betriebsmodi, mit denen Drehmoment, Präzision und Schrittgröße ausgleichen:
• Wellenmodus: In diesem Modus wird jeweils nur eine Spule mit Energie versorgt.Die Aktivierung einer einzelnen Spule dreht den Motor um 90 Grad in eine Richtung, während der Strom umgedreht wird. Dreht ihn in die entgegengesetzte Richtung.Durch die Abwechslung zwischen den Spulen erreicht der Motor einen kontinuierlichen Betrieb.Dieser Modus ist einfach, bietet aber weniger Drehmoment im Vergleich zu anderen Modi.
• Vollschritt-Modus: Beide Spulen werden in diesem Modus gleichzeitig mit Energie versorgt und erzeugen ein stärkeres Magnetfeld.Dies führt zu einem erhöhten Drehmoment, was es ideal für Anwendungen macht, die mehr Leistung und Stabilität erfordern.
• Halbschritt-Modus: Als Kombination aus dem Wellenmodus und dem vollständigen Stufenmodus wechselt dieser Modus zwischen der Energieversuche einer einzelnen Spule und beiden Spulen.Es reduziert die Schrittgröße effektiv auf 45 Grad und liefert ein Gleichgewicht zwischen Präzision und Drehmoment.Das Drehmoment kann jedoch variieren, je nachdem, ob eine oder beide Spulen während eines bestimmten Schritts mit Energie versorgt werden.
• Microstep -Modus : Die genaueste aller Modi reduziert der Mikrostep -Modus die Schrittgröße noch weiter, indem der Strom durch die Motorphasen sorgfältig moduliert.Dies wird mithilfe erweiterter Schaltkreise erreicht, um reibungslose und allmähliche Übergänge zwischen den Schritten zu erzeugen.Dieser Modus ist ideal für Anwendungen, die ein hohes Präzision und ein konsistentes Drehmoment erfordern, wie z. B. CNC -Maschinen oder Robotik.
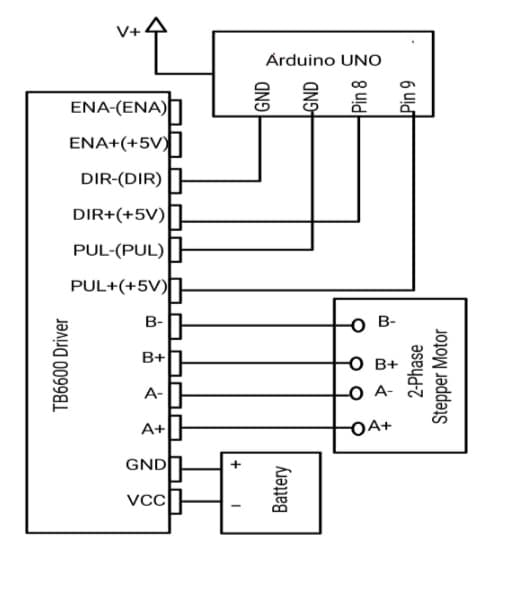
Integration von TB6600 in Arduino Uno
Die effiziente Kontrolle von Schrittmotoren erfordert eine Kombination aus zuverlässiger Hardware und sorgfältig programmierter Software.Der TB6600 Stepper Motor Triver ist ein hervorragendes Werkzeug für den Betrieb von 2-Phasen-Schrittmotoren.Es unterstützt mehrere Betriebsmodi wie Wellen, Vollschritt, Halbschritt und Mikroschritt.Die eingebauten Schutzmerkmale-einschließlich der Schutzmaßnahmen gegen niedrige Spannung, Überstrom und Überhitzung-erfüllen es eine solide Wahl für Projekte, die Präzision und Haltbarkeit fordern.
Um den TB6600 mit einem Arduino Uno einzurichten, sammeln Sie die folgenden Komponenten:
• Arduino uno r3
• TB6600 Stepper Motor Driver (4A -Version)
• Schrittmotor (mit einer empfohlenen Bewertung von 1,65a)
• Zuverlässige Stromversorgung (z. B. eine Batterie oder eine regulierte DC -Stromquelle)
• Jumperdrähte
• Arduino IDE auf Ihrem Computer installiert
Befolgen Sie diese detaillierten Anweisungen, um den TB6600 in den Arduino zu integrieren
Schließen Sie die Richtung und Impulssignale an
• Verknüpfen Sie die Dir+ und Pul+ -Anminals am TB6600 mit den Arduino -Pins 8 bzw. 9.Diese Stifte senden Richtung und Impulssignale.
• Befestigen Sie die Dir- und Impulsanschlüsse am Boden (GND) des Arduino.
• Schließen Sie den Motor an den TB6600 an: Befestigen Sie die Schrittmotordrähte an den TB6600 -Klemmen.
• A+ und a- für eine Spule des Motors.
• B+ und B- für die andere Spule.
• Fahren Sie den TB6600 -Treiber mit: Verbinden Sie die VCC- und GND -Stifte am TB6600 mit Ihrem Netzteil.Stellen Sie sicher, dass die Spannung mit Ihren Motor- und Fahreranforderungen entspricht, um Schäden zu vermeiden.
Einstellen der mikrostep -Auflösung
Mit dem TB6600 können Sie die Bewegungsgenauigkeit des Stepper-Motors mit den SW1- und SW2-Schalter fein abstellen.Passen Sie diese Schalter wie folgt an:
• ¼ Schrittauflösung: SW1 einstellen und SW2 ausschalten.
• ⅛ Schrittauflösung: SW1 aus und SW2 einstellen.
• 1/32 Schrittauflösung: Stellen Sie sowohl SW1 als auch SW2 aus.
• Modus mit Vollschritt: Stellen Sie sowohl SW1 als auch SW2 ein.
Wahrheitstabelle
|
SW2 |
Microstep -Auflösung |
|
AUS |
1/32 Schritt |
|
AN |
1/8 Schritt |
|
AUS |
1/4 Schritt |
|
AN |
Voller Schritt |
Mit Schaltanpassungen können Sie das Gleichgewicht zwischen Präzision und Geschwindigkeit basierend auf den Anforderungen Ihres Projekts optimieren.
Um sicherzustellen, dass Ihr Motor innerhalb sicherer Stromgrenzen arbeitet, verfügt der TB6600 für zusätzliche Schalter (SW4 und SW6) zum Einstellen des Stromflusses.Diese Einstellungen sind nützlich für:
• Überlastungsschäden verhindern.
• Aufrechterhaltung einer konsistenten motorischen Leistung.
• Überprüfen Sie immer, ob der Motorstrom unter dem Maximum des Fahrers 4A bleibt, um beide Komponenten zu schützen.
• Steuerungsrichtung der Motor: Wenn der Motor gegen den Uhrzeigersinn dreht, ändern Sie den Status des Dir+ Pin in Ihrem Arduino -Code.
• Testen und Fehlerbehebung: Laden Sie nach Abschluss des Setups eine grundlegende Skizze für Stepper -Motorsteuerung hoch, um die Verkabelungs- und Treiberfunktionalität zu überprüfen.
• Überhitzung vermeiden: Stellen Sie die ordnungsgemäße Belüftung für den TB6600-Treiber sicher, insbesondere in hochstromigen Anwendungen.
Anwendungen
Das TB6600 -Modul spielt eine aktive Rolle in zahlreichen Sektoren, in denen eine sorgfältige Motorkontrolle verwendet wird.Seine Anpassungsfähigkeit erscheint in verschiedenen Implementierungen, die seine einzigartigen Fähigkeiten hervorheben:
Antennenpositionierung
Im Bereich der Telekommunikation ist das Erreichen einer optimalen Antennenausrichtung für den Qualitätssignalempfang und die Qualitätsübertragung obligatorisch.Der TB6600 erleichtert die Präzisionsbewegung und verbessert damit die Wirksamkeit von Kommunikationssystemen.
Stepper Motor Management
Innerhalb von Automatisierung und Robotik wird durch den TB6600 eine präzise Handhabung des Stepper -Motors erreicht, sodass Sie die Zuverlässigkeit der Bewegungspräzision und zur Stärkung der Systemversorgung verfeinern können.
CNC -Operationen
Für Computer Numerical Control (CNC) -Maschinen verbessert der TB6600 komplizierte Schnitt- und Fräsenprozesse, sodass Sie ein hohes Maß an Genauigkeit und wiederholbare Präzision in ihrer Arbeit aufrechterhalten können.
3D -Druckpräzision
In der additiven Herstellung, insbesondere des 3D -Drucks, bietet der TB6600 eine detaillierte motorische Steuerung und unterstützt die genaue Positionierung von Druckköpfen, die zum Erstellen komplexer Formen und Formen erforderlich sind.
Komplexe motorische Steuerung
Das Modul ist für komplizierte Motorsteuerungsaufgaben in komplexen Automatisierungssystemen wertvoll, die die Effizienz verbessert und das raffinierte Management ermöglicht.
Steuerung von Geschwindigkeit, Position und Drehung
Die TB6600 zeichnet sich in Szenarien aus, die eine genaue Geschwindigkeit und Rotationskontrolle erfordern und hauptsächlich zur Optimierung der Leistung in ständig ändernden Umgebungen verwendet werden.
Bildgebungsgeräte und Bankensysteme
Das Modul unterstützt den zuverlässigen Betrieb von Kameras und Geldautomaten, indem sie reibungslose, genaue Motorbewegungen sicherstellen, die die Betriebsdauer der Geräte erweitern.
Präzision in Gravurgeräten
Für Gravurwerkzeuge und Maschinen bietet der TB6600 die genaue Kontrolle, die für die Ausführung fein detaillierter Designs erforderlich ist, einen gefährlichen Faktor in Branchen, in dem Präzision und Details dominieren.
Über uns
ALLELCO LIMITED
Weiterlesen
Schnelle Anfrage
Bitte senden Sie eine Anfrage, wir werden sofort antworten.
Häufig gestellte Fragen [FAQ]
1. Welches Netzteil soll ich für den TB6600 -Treiber verwenden?
Der TB6600 Stepper Motor Triver arbeitet mit einer Stromversorgungsspannung zwischen 8 V und 45 V.
2. Wie kann ich die Geschwindigkeit des Schrittmotors mit dem TB6600 steuern?
Der TB6600 verwendet die Pulsbreitenmodulation (PWM), um die Motordrehzahl anzupassen.Sie können die Geschwindigkeit ändern, indem Sie die PWM -Frequenz ändern.
3. Kann der TB6600 Hochstrom-Steppermotoren unterstützen?
Ja, der TB6600 kann bis zu 4,5a verarbeiten, was ihn mit Stepper -Motoren kompatibel macht, die auf diesen Strom bewertet werden.
4. Wie kann ich die motorische Richtung mit dem TB6600 umkehren?
Um die motorische Richtung umzukehren, wechseln Sie die Eingangssignalsequenz auf den Kontrollstiften (z. B. in1-in2-in3-in4 für Vorwärts, in4-in3-in2-in1 für Rückwärts).
5. Kann ich einen Schrittmotor mit mehr als 4 Drähten an den TB6600 anschließen?
Der TB6600 ist für 4-Draht-Steppermotoren hergestellt.Wenn Ihr Motor über mehr als 4 Drähte verfügt, benötigen Sie einen anderen Fahrer.
6. Ist der TB6600 mit einem NEMA23 -Stepper -Motor kompatibel?
Der TB6600 funktioniert gut mit NEMA17 -Motoren, ist jedoch aufgrund ihrer höheren Stromanforderungen für NEMA23 -Motoren im Allgemeinen ungeeignet.

Eine vollständige Anleitung zum E18-D80NK-einstellbaren IR-Sensor
auf 2024/12/12
DS3231 RTC -Modul erklärt: Pin -Diagramm, Spezifikationen und Mikrocontroller -Schnittstellen
auf 2024/12/12
Beliebte Beiträge
-

Komplexe Anweisungssatzcomputer: Wie verändert sie das Computer?
auf 8000/04/18 147757
-

USB-C-Pinout und Funktionen
auf 2000/04/18 111934
-

Verwenden von Xilinx Unified Simulation Primitive: Ein umfassender Leitfaden für FPGA -Design und -Simulation
auf 1600/04/18 111349
-

Stromversorgungsspannungen in der Elektronik: Bedeutung von VCC, VDD, VEE, VSS und GND
auf 0400/04/18 83719
-

RJ45 -Anschlusshandbuch: Pinbeleg, Kabeltypen und Verwendung
auf 1970/01/1 79508
-

Die ultimative Anleitung zu Farbcodes in modernen elektrischen Systemen
Die Art und Weise, wie unsere elektrischen Systeme Farben verwenden, gilt nicht nur für das Aussehen.Jede Drahtfarbe zeigt nun eine bestimmte Funktion an und erleichtert die Identifizierung und Ver...auf 1970/01/1 66900
-

Leitfaden für Spülventile: Funktion, Symptome, Test und Ersatz für eine optimale Motorleistung
Das Säuberventil ist ein wesentlicher Bestandteil eines Autosystems, mit dem die Luft sauber hält, indem sie Kraftstoffdämpfe verwalten, bevor sie in die Atmosphäre entkommen können.Dies hilft der ...auf 1970/01/1 63017
-

Qualität (q) Faktor: Gleichungen und Anwendungen
Der Qualitätsfaktor oder "Q" ist wichtig, wenn Sie überprüfen, wie gut Induktoren und Resonatoren in elektronischen Systemen funktionieren, die Funkfrequenzen (RF) verwenden.'Q' misst, wie gut ein ...auf 1970/01/1 63010
-

Erreichen der Spitzenleistung mit dem maximalen Stromübertragungssatz
Der maximale Stromübertragungssatz erklärt, wie Energie aus einer Quelle wie einer Batterie oder einem Generator zu einer angeschlossenen Last fließt.Es zeigt die genaue Bedingung, bei der die Last...auf 1970/01/1 54081
-

A23 Batteriespezifikationen und Kompatibilität
Die A23-Batterie ist eine kleine, zylinderförmige Batterie mit hoher Spannung.Auch 23A, 23Ae oder Mn21 genannt, läuft es mit 12 Volt und viel höher als AA- oder AAA -Batterien.Sein besonde...auf 1970/01/1 52121
Heiße Teilenummer
-

LCMXO2280C-5FTN324C
Lattice Semiconductor Corporation
IC FPGA 271 I/O 324FTBGA
KBP202G
Diodes Incorporated
BRIDGE RECT 1PHASE 200V 2A KBP
C5750X5R2A475K230KA
TDK Corporation
CAP CER 4.7UF 100V X5R 2220
GRM2165C1H472JA01D
Murata Electronics
CAP CER 4700PF 50V C0G/NP0 0805
LTC3835EFE#PBF
Analog Devices Inc.
IC REG CTRLR BUCK 20TSSOP
CPC1943GS
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 500MA 0-400V
MPC5121YVY400B
NXP USA Inc.
IC MCU 32BIT ROMLESS 516FPBGA
1N5399
NTE Electronics, Inc
DIODE GEN PURP 1KV 1.5A DO15
1210GA470KAT1A
KYOCERA AVX
CAP CER 47PF 2KV NP0 1210
IR3507MTRPBF
Infineon Technologies
IC XPHASE3 CONTROL 20-MLPQ
M27C2001-10B1
STMicroelectronics
IC EPROM 2MBIT PARALLEL 32DIP
1N3288
Microchip Technology
STANDARD RECTIFIER
SI4942DY-T1-E3
Vishay Siliconix
MOSFET 2N-CH 40V 5.3A 8-SOIC
FQB6N80TM
onsemi
MOSFET N-CH 800V 5.8A D2PAK
NB7L14MMNG
onsemi
IC CLK BUFFER 1:4 8GHZ 16QFN
GRM0336R1E8R8DD01D
Murata Electronics
CAP CER 8.8PF 25V R2H 0201
SP6205ER-L-2-5
MaxLinear, Inc.
IC REG LINEAR 2.5V 500MA 8DFN
ISL28196FHZ-T7
Renesas Electronics America Inc
IC COMPARATOR 1 GEN PUR 6SOT -

LMX2571NJKT
Texas Instruments
IC FREQ SYNTH 36WQFN
ADAS1000-2BSTZ-RL
Analog Devices Inc.
IC AFE 5 CHAN 19BIT 64LQFP
FH41-50S-0.5SH(05)
Hirose Electric Co Ltd
CONN FFC BOTTOM 50POS 0.5MM R/A
RN242CST2RA
Rohm Semiconductor
RF DIODE PIN 30V VMN2
C1608X7R1E105K080AB
TDK Corporation
CAP CER 1UF 25V X7R 0603
VI-25L-MV
Vicor Corporation
DC DC CONVERTER 28V 150W
ATMEGA328-PU
Microchip Technology
IC MCU 8BIT 32KB FLASH 28DIP
FCP165N65S3R0
onsemi
MOSFET N-CH 650V 19A TO220-3
STPS3L60RL
STMicroelectronics
DIODE SCHOTTKY 60V 3A DO201AD
NDS336P
onsemi
MOSFET P-CH 20V 1.2A SUPERSOT3
BCM5482SA1KFBG
Broadcom Limited
DUAL PORT 10/100/1000BASE-T PH
AUIRFS8407TRL
Infineon Technologies
MOSFET N-CH 40V 195A D2PAK
CL31B474KAFNNNE
Samsung Electro-Mechanics
CAP CER 0.47UF 25V X7R 1206
LM2588SX-12
Texas Instruments
IC REG MULT CONFG 12V 5A TO263-7
W83775G
Nuvoton Technology Corporation
SENSOR DIGITAL -40C-125C 10TSSOP
LTC6244HVIMS8#TRPBF
Analog Devices Inc.
IC CMOS 2 CIRCUIT 8MSOP
78119-1258
Molex
0.5 FPC CONN. VERTICAL SMT NON-Z
MC10H124MEL
onsemi
IC TRANSLATOR UNIDIR 16SOEIAJ -

VI-J14-CZ
Vicor Corporation
DC DC CONVERTER 48V 25W
SIZ910DT-T1-GE3
Vishay Siliconix
MOSFET 2N-CH 30V 40A POWERPAIR
EPF10K30EFC256-1
Altera
IC FPGA 176 I/O 256FBGA
SN74HC373AN
Texas Instruments
IC DTYPE LATCH OCTAL 20DIP
FT24C02A-KTR-T
Fremont Micro Devices Ltd
IC EEPROM 2KBIT I2C 1MHZ 8TSSOP
175975-2
TE Connectivity AMP Connectors
CONN HEADER R/A 20POS 2.5MM
FAN7554
onsemi
IC REG CTLR FLYBK/FWRD CONV 8DIP
UCV1E102MNL1GS
Nichicon
CAP ALUM 1000UF 20% 25V SMD
006208520310000/+
KYOCERA AVX
CONN FFC FPC VERT 20POS 1MM SMD
55932-0730
Molex
2.0 WTB PLG HSG ASSY STR W/O BOS
FDB33N25TM
Fairchild Semiconductor
POWER FIELD-EFFECT TRANSISTOR, 3
B0530WS-7-F
Diodes Incorporated
DIODE SCHOTTKY 30V 500MA SOD323
M27C256B-90C1
STMicroelectronics
IC EPROM 256KBIT PARALLEL 32PLCC
XC4085XLA-09BG432C
AMD
FPGA, 3136 CLBS, 55000 GATES
UCD3020ARGZR
Texas Instruments
IC DGTL PWR CTRLR 48VQFN
TPS74401RGWR
Texas Instruments
IC REG LINEAR POS ADJ 3A 20VQFN
CL21B222KBANNNC
Samsung Electro-Mechanics
CAP CER 2200PF 50V X7R 0805
THS4061IDRG4
Texas Instruments
IC VOLTAGE FEEDBACK 1 CIRC 8SOIC