Einführung in Steuerungssysteme: Funktionsweise, Typen und Anwendungen
Regelsysteme kommen immer dann zum Einsatz, wenn eine Maschine einen Wert automatisch konstant hält, etwa Temperatur, Geschwindigkeit oder Füllstand.In diesem Artikel wird erklärt, was ein Steuerungssystem ist, wie seine Teile zusammenarbeiten und wie Feedback dafür sorgt, dass die Ausgabe korrekt bleibt.Außerdem lernen Sie die wichtigsten Anlagentypen kennen und erfahren, wie sie sich im Betrieb verhalten.Allgemeine Verwendungszwecke, Vorteile und Grenzen sind enthalten.Katalog
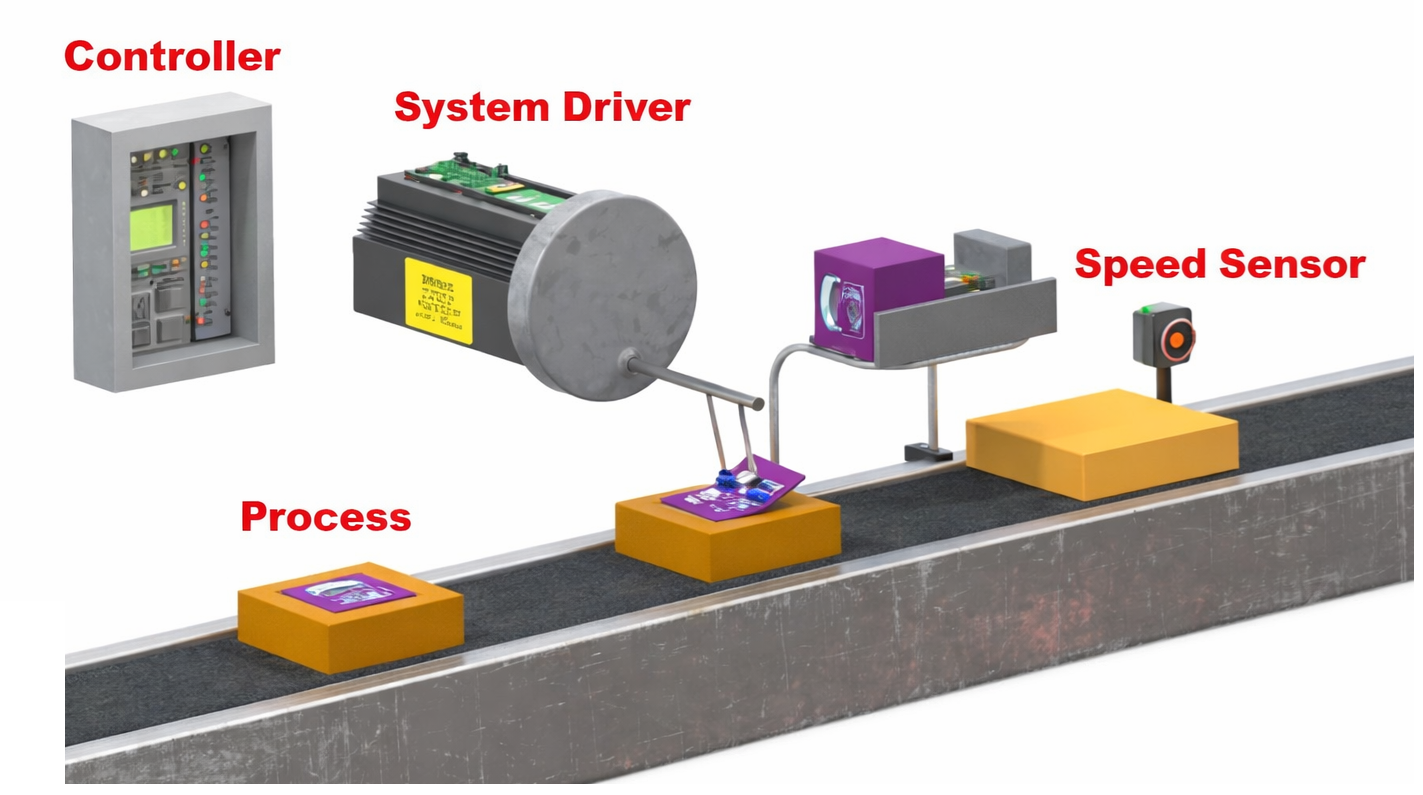
Abbildung 1. Beispiel eines Steuerungssystems
Was ist ein Kontrollsystem?
Ein Steuerungssystem ist ein System, das einen Messwert nahe einem gewünschten Zielwert hält.Sein Zweck besteht darin, einen Prozess automatisch anzupassen, sodass die Ausgabe auch dann korrekt bleibt, wenn sich die Bedingungen ändern.Beispielsweise hält ein Raumthermostat die Temperatur nahe dem eingestellten Wert, und ein Tempomat hält das Fahrzeug auf einer ausgewählten Geschwindigkeit.Ein Wassertank-Füllstandsregler hält außerdem den Wasserstand auf einer gewählten Marke.Vereinfacht ausgedrückt überprüft und korrigiert ein Steuerungssystem kontinuierlich eine Variable, um sie an den erforderlichen Wert anzupassen.
Grundelemente eines Steuerungssystems
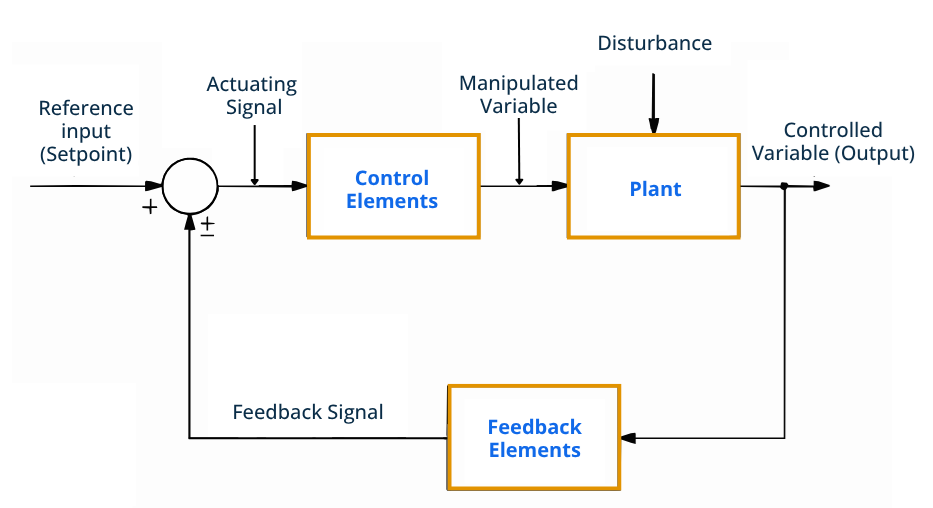
Abbildung 2. Blockdiagramm des Steuerungssystems
Ein Steuerungssystem besteht aus mehreren Standardteilen, die jeweils eine bestimmte Aufgabe erfüllen.
• Referenzeingang (Sollwert)
Dies ist der gewünschte Wert, den das System beizubehalten versucht.Es stellt die ausgewählte Zielbedingung dar.Das System vergleicht immer den tatsächlichen Wert mit dieser Referenz.
• Betätigungssignal
Dies ist das Signal, das nach dem Vergleich von Soll- und Istwert entsteht.Es gibt an, wie viel Anpassung erforderlich ist.Das Signal bereitet das System auf die Korrektur vor.
• Steuerelemente
Diese Teile kümmern sich um den Entscheidungsprozess.Sie bestimmen die Korrekturmaßnahme anhand des empfangenen Signals.Die Ergebnisse dieser Phase bereiten den Prozess auf die Anpassung vor.
• Manipulierte Variable
Dies ist die einstellbare Menge, die dem Prozess zugeführt wird.Das Ändern dieses Werts beeinflusst die endgültige Ausgabe.Es handelt sich um die Variable, die das System direkt variieren kann.
• Pflanze
Die Anlage ist der Prozess, der gesteuert wird.Es erzeugt den endgültigen Ausgabewert.Ziel des Systems ist es, diese Leistung auf dem gewünschten Niveau zu halten.
• Störung
Dies ist eine unerwünschte Änderung, die sich auf den Prozess auswirkt.Dadurch kann der Ausgang vom gewünschten Wert abweichen.Das System muss das kompensieren.
• Kontrollierte Variable (Ausgabe)
Dies ist das tatsächlich gemessene Ergebnis des Prozesses.Es zeigt den aktuellen Zustand des Systems.Das Ziel besteht darin, ihn auf dem gleichen Niveau wie die Referenzeingabe zu halten.
• Feedback-Elemente
Diese messen die Leistung und senden Informationen zur Überprüfung zurück.Sie liefern dem System den aktuellen Zustand.Dadurch kann eine Korrektur ermittelt werden.
• Feedback-Signal
Dies sind die zurückgegebenen Informationen über den Ausgabewert.Es stellt den Zustand des Prozesses dar.Das System verwendet es zum Vergleich.
Funktionsprinzip des Kontrollsystems
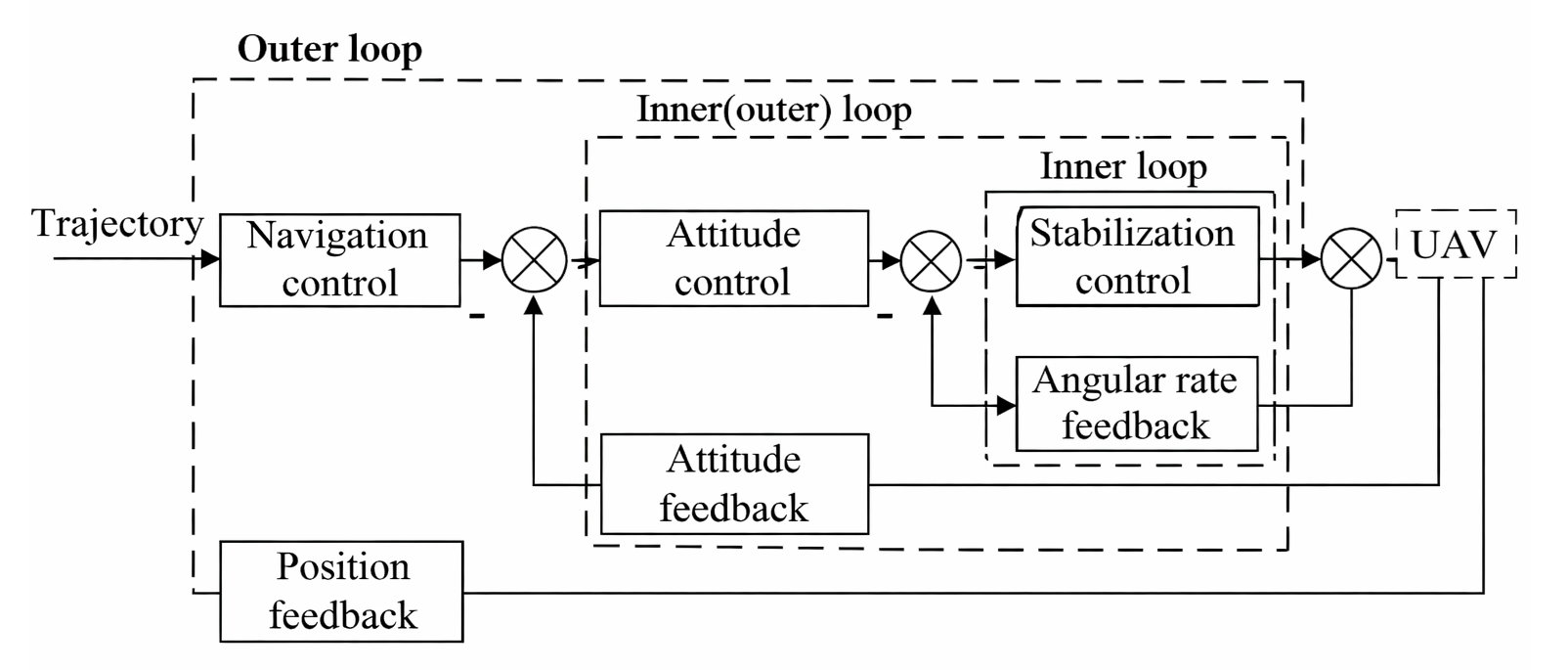
Abbildung 3. Funktionsprinzip des Steuerungssystems
Das Funktionsprinzip eines Steuerungssystems beginnt damit, dass dem System ein gewünschter Eingabewert vorgegeben wird.Anschließend vergleicht das System diesen Wert mit dem tatsächlichen Ausgabewert.Der Unterschied zwischen ihnen wird als Fehlersignal bezeichnet.Liegt der Fehler vor, generiert das System ein Korrektursignal.Diese Korrektur passt den Prozess an, um den Fehler zu reduzieren.Die Ausgabe ändert sich und wird fortlaufend erneut überprüft.Der Zyklus wiederholt sich, bis die Ausgabe nahezu dem gewünschten Wert entspricht.
Eigenschaften von Steuerungssystemen
Steuerungssysteme werden danach bewertet, wie gut sie im Betrieb funktionieren.Diese Merkmale beschreiben die Qualität und Zuverlässigkeit der Systemreaktion.
|
Eigenschaften |
Beschreibung |
|
Stabilität |
Die Ausgabe funktioniert
nicht divergieren;kehrt nach einer Störung auf einen stabilen Wert zurück |
|
Genauigkeit |
Endgültiger Fehler ≤
±2–5 % des eingestellten Wertes |
|
Präzision |
Ausgabe
Abweichung ≤ ±1 % bei gleichem Eingang |
|
Reaktionszeit
|
Anfänglich
Reaktion erfolgt innerhalb der gemessenen Verzögerungszeit (td) |
|
Aufstiegszeit |
Zeit ab 10 %
bis 90 % des Endwertes |
|
Einschwingzeit |
Tritt ein und
bleibt innerhalb des ±2 %-Bandes |
|
Überschießen |
Peak überschreitet
Endwert nach %-Betrag |
|
Steady-State
Fehler |
Konstant
Versatz, der nach der Stabilisierung verbleibt |
|
Empfindlichkeit |
ΔAusgang /
ΔParameteränderungsverhältnis |
|
Robustheit |
Pflegt
Betrieb trotz Störungsänderung |
|
Bandbreite |
Funktioniert
effektiv bis zu einer Grenzfrequenz von –3 dB |
|
Wiederholbarkeit |
Gleiche Eingabe
erzeugt innerhalb der Toleranz die gleiche Leistung |
|
Zuverlässigkeit |
Funktioniert
ohne Ausfall für Nennbetriebszeit (MTBF) |
|
Dämpfung |
Schwingung
Zerfall bestimmt durch das Dämpfungsverhältnis ζ |
|
Geschwindigkeit von
Antwort |
Gesamtzeit bis
stabilen Zustand erreichen |
Arten von Steuerungssystemen
Steuerungssysteme werden danach klassifiziert, wie sie mit Informationen, Signalen und Reaktionsverhalten umgehen.Sie sind nach Feedback-Nutzung, Signalform und mathematischem Verhalten gruppiert.
Open-Loop-Steuerungssystem
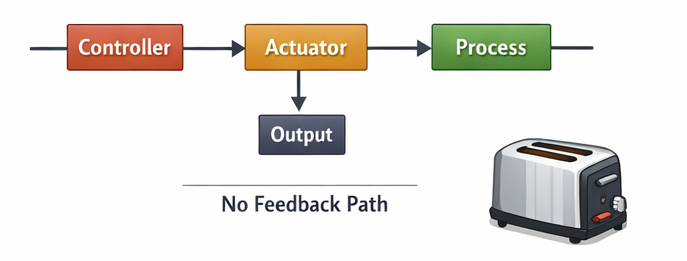
Abbildung 4. Diagramm des Open-Loop-Steuerungssystems
Ein Steuersystem mit offenem Regelkreis ist ein System, bei dem die Ausgabe keinen Einfluss auf die Steueraktion hat.Das System sendet einen Befehl und geht davon aus, dass das Ergebnis korrekt ist, ohne es zu überprüfen.Da es keinen Rückkopplungspfad gibt, können Fehler oder Störungen nicht automatisch korrigiert werden.Die Leistung hängt hauptsächlich von der richtigen Kalibrierung und den Betriebsbedingungen ab.Diese Systeme sind einfach, kostengünstig und leicht zu entwerfen.Allerdings können Änderungen der Last oder der Umgebung das Endergebnis beeinflussen.Gängige Beispiele sind ein elektrischer Toaster-Timer, eine Waschmaschinen-Timersteuerung und ein fester Bewässerungstimer.
Closed-Loop-Steuerungssystem
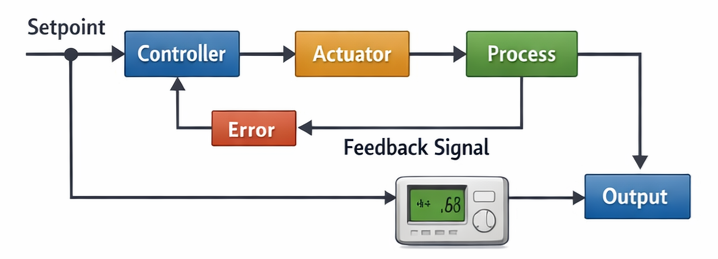
Abbildung 5. Diagramm des geschlossenen Regelsystems
Ein Regelsystem ist ein System, das seine Leistung mithilfe von Rückmeldungen automatisch anpasst.Das System misst das Ergebnis und vergleicht es mit dem Soll-Wert.Tritt ein Unterschied auf, wird eine Korrektur vorgenommen, um den Fehler zu reduzieren.Diese kontinuierliche Anpassung ermöglicht einen präzisen und stabilen Betrieb auch bei wechselnden Bedingungen.Systeme mit geschlossenem Regelkreis bieten eine höhere Präzision und Zuverlässigkeit als Systeme mit offenem Regelkreis.Sie werden häufig in modernen automatischen Steuerungsanwendungen eingesetzt.Typische Beispiele sind die Temperaturregelung von Klimaanlagen, die Geschwindigkeitsregelung von Fahrzeugen und automatische Spannungsregler.
Kontinuierliches Kontrollsystem
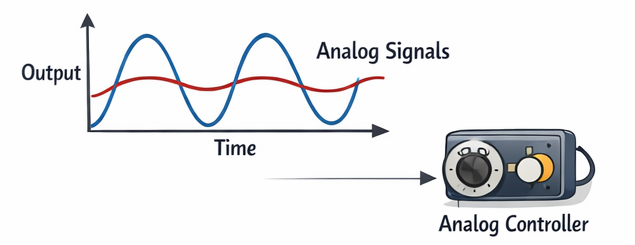
Abbildung 6. Zeitkontinuierliches (analoges) Steuersignal
Ein zeitkontinuierliches Steuerungssystem verarbeitet Signale, die sich im Laufe der Zeit reibungslos ändern.Der Ein- und Ausgang existiert zu jedem Zeitpunkt ohne Unterbrechung.Diese Systeme arbeiten meist mit analogen elektrischen oder mechanischen Signalen.Da die Signale kontinuierlich sind, ist auch die Reaktion gleichmäßig und natürlich.Zeitkontinuierliche Systeme sind häufig in herkömmlichen analogen Steuerungen zu finden.Sie eignen sich für physikalische Prozesse, die eine sofortige Reaktion erfordern.Beispiele hierfür sind analoge Geschwindigkeitsregler, Lautstärkeregelung für Audioverstärker und hydraulische Ventilstellungsregelung.
Zeitdiskretes Steuerungssystem
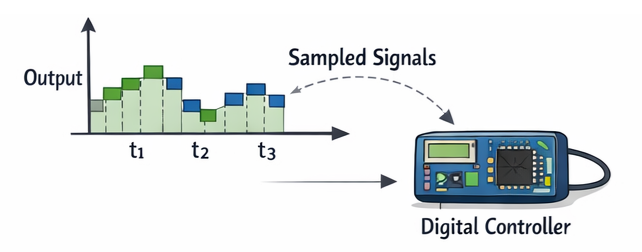
Abbildung 7. Zeitdiskretes (digitales) Steuersignal
Ein zeitdiskretes Steuerungssystem arbeitet mit abgetasteten Datensignalen.Das System prüft und aktualisiert Werte nur in bestimmten Zeitintervallen.Diese Signale werden üblicherweise von digitalen Controllern oder Mikroprozessoren verarbeitet.Die Ausgabe ändert sich schrittweise und nicht kontinuierlich.Solche Systeme ermöglichen einen programmierbaren Betrieb und eine flexible Anpassung.Sie werden häufig in der modernen elektronischen und computergestützten Steuerung eingesetzt.Beispiele hierfür sind mikrocontrollerbasierte Temperaturregelung, digitale Motordrehzahlregelung und Smart-Home-Thermostate.
Lineares Steuerungssystem
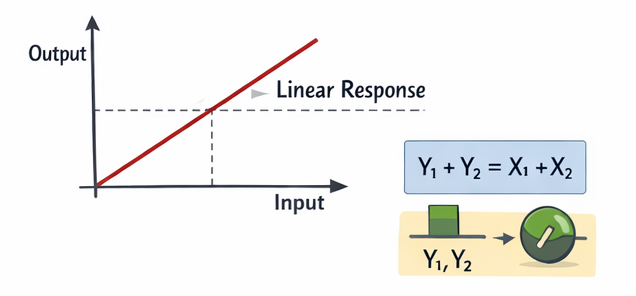
Abbildung 8. Input-Output-Beziehung eines linearen Systems
Ein lineares Steuersystem folgt einem proportionalen Verhältnis zwischen Eingang und Ausgang.Wenn sich der Input verdoppelt, verdoppelt sich unter den gleichen Bedingungen auch der Output.Diese Systeme erfüllen das Superpositionsprinzip, bei dem kombinierte Eingaben kombinierte Ausgaben erzeugen.Lineares Verhalten ermöglicht eine vorhersehbare und einfache mathematische Analyse.Die meisten theoretischen Steuerungsentwürfe gehen der Einfachheit halber von einem linearen Betrieb aus.Lineare Modelle helfen beim Entwurf stabiler und genauer Systeme.Beispiele hierfür sind elektronische Kleinsignalverstärker und Motorsteuerbereiche mit geringer Last.
Nichtlineares Steuerungssystem
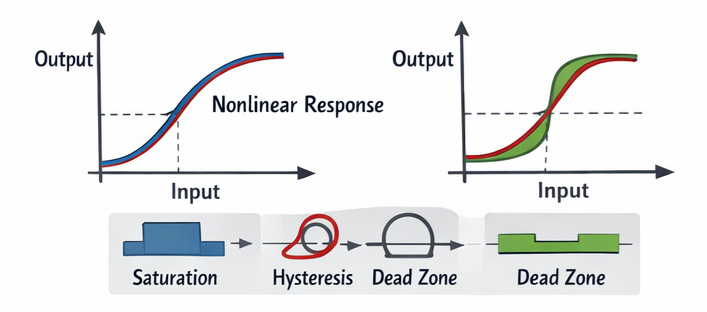
Abbildung 9. Nichtlineare Systemantworteigenschaften
Ein nichtlineares Steuerungssystem hat einen Ausgang, der nicht proportional zum Eingang ist.Die Reaktion ändert sich je nach Betriebsbereich oder Bedingungen.Kleine Eingabeänderungen können zu großen Ausgabeschwankungen oder überhaupt keiner Änderung führen.Häufig treten Effekte wie Sättigung, Hysterese und Totzonen auf.Diese Systeme sind schwieriger zu analysieren, stellen aber physikalische Prozesse genauer dar.Viele Systeme verhalten sich von Natur aus nichtlinear.Beispiele hierfür sind Bewegungsgrenzen von Roboterarmen, das Verhalten magnetischer Aktuatoren und die Ventilflusssteuerung in extremen Positionen.
Vor- und Nachteile von Steuerungssystemen
Kontrollsysteme verbessern die Konsistenz und reduzieren den manuellen Aufwand, bringen aber auch Komplexität und Kosten mit sich.
Vorteile von Steuerungssystemen
• Das System hält die Leistung während des Betriebs nahe am erforderlichen Wert.
• Bediener müssen die Ausrüstung nicht ständig manuell einstellen.
• Maschinen können stundenlang laufen, ohne häufig anzuhalten.
• Das System korrigiert Änderungen der Konditionen automatisch.
• Der Betriebsstatus kann über ein Bedienfeld oder eine Fernanzeige überprüft werden.
Nachteile von Steuerungssystemen
• Die Einrichtungskosten sind höher als bei einfachen manuellen Systemen.
• Für den Aufbau und Service werden Fachkräfte benötigt.
• Sensoren und elektronische Teile können mit der Zeit ausfallen.
• Das Finden der Ursache von Problemen kann länger dauern.
• Das System ist auf eine stabile Stromversorgung angewiesen.
Anwendungen von Steuerungssystemen
Steuerungssysteme werden sowohl in der industriellen Automatisierung als auch in Alltagsgeräten eingesetzt, um automatisch den ordnungsgemäßen Betrieb aufrechtzuerhalten.
1. Industrielle Fertigung
Produktionsmaschinen sorgen für gleichbleibende Produktabmessungen und -qualität.Automatisierte Montagelinien nutzen die Regulierung, um die Wiederholbarkeit sicherzustellen.Dies reduziert Abfall und verbessert die Effizienz.
2. Temperaturregulierung
Heiz- und Kühlgeräte sorgen für angenehme Umgebungsbedingungen.Gebäude sind auf automatische Anpassungen angewiesen, um das Raumklima zu stabilisieren.Dies verbessert die Energieeffizienz und den Komfort.
3. Transportsysteme
Fahrzeuge nutzen Geschwindigkeits- und Stabilitätskontrolle für einen reibungsloseren Betrieb.Moderne Autos verfügen über Tempomat- und Traktionssysteme.Diese verbessern die Fahrsicherheit und Leistung.
4. Energiesysteme
Elektrische Netze regeln Spannungs- und Frequenzniveaus.Generatoren passen die Leistung an den Lastbedarf an.Dadurch ist eine stabile Stromversorgung gewährleistet.
5. Robotik und Automatisierung
Roboter führen präzise Positionierungs- und Bewegungsaufgaben aus.Automatisierte Maschinen arbeiten kontinuierlich mit hoher Präzision.Dies ermöglicht eine fortschrittliche Fertigung.
6. Medizinische Ausrüstung
Die Geräte sorgen während der Behandlung für kontrollierte Betriebsbedingungen.Überwachungsgeräte halten die Werte innerhalb sicherer Grenzen.Dies verbessert die Patientensicherheit und Zuverlässigkeit.
7. Haushaltsgeräte
Alltagsgeräte verwalten die Betriebseinstellungen automatisch.Waschmaschinen und Kühlschränke sorgen für ordnungsgemäße Betriebsbedingungen.Dies vereinfacht die täglichen Aufgaben.
8. Luft- und Raumfahrtsysteme
Flugzeuge und Drohnen sorgen für stabile Flugbedingungen.Die automatische Führung sorgt für die richtige Ausrichtung und Höhe.Dies unterstützt eine zuverlässige Navigation.
Steuerungssystem vs. Automatisierung vs. eingebettete Systeme
Diese Technologien sind eng miteinander verbunden, dienen jedoch unterschiedlichen technischen Zwecken in modernen elektronischen und industriellen Produkten.
|
Funktion |
Kontrolle
System |
Automatisierung |
Eingebettet
System |
|
Hauptfokus |
Regulierung von
Variablen |
Prozess
Ausführung |
Gerät
Betrieb |
|
Zweck |
Pflegen
gewünschten Wert |
Aufgaben ausführen
automatisch |
Dediziert ausführen
Funktionen |
|
Umfang |
Spezifisch
Prozessverhalten |
Ganz
Arbeitsablauf
|
Single
Produktgerät |
|
Entscheidung
Fähigkeit |
Basierend auf
Messwerte |
Basierend auf
programmierte Logik |
Basierend auf
Firmware |
|
Feedback-Nutzung |
Oft
erforderlich |
Optional |
Optional |
|
Hardwaretyp |
Sensoren und
Aktoren |
Maschinen und
Controller |
Mikrocontroller
Brett |
|
Softwarerolle |
Berechnung
und Korrektur |
Sequenzierung
und Koordination |
Gerät
Steuerlogik |
|
Antworttyp |
Kontinuierlich
Anpassung |
Aufgabe
Ausführung |
Funktioneller Betrieb |
|
Systemgröße |
Klein bis
mittel |
Mittel bis
groß |
Sehr klein |
|
Flexibilität |
Mäßig |
Hoch |
Begrenzt |
|
Zeit
Anforderung |
Hoch |
Mäßig |
Hoch |
|
Bewerbung
Ebene |
Prozessebene |
Pflanzenebene |
Produktebene |
|
Beispiel |
Temperatur
Kontrolle |
Fabrik
Produktionslinie |
Smartwatch |
|
Integration |
Teil von
Automatisierung |
Enthält
Steuerungssysteme |
Unterstützt beides |
Fazit
Steuerungssysteme sorgen für Stabilität, indem sie die tatsächliche Leistung kontinuierlich mit einem Zielwert vergleichen und etwaige Fehler korrigieren.Ihre Leistung hängt von Kernelementen wie Feedback, Controller-Aktion und dem kontrollierten Prozess ab.Verschiedene Klassifizierungen definieren, wie mit Signalen umgegangen wird und wie genau ein System auf Störungen reagiert.Aufgrund dieser Fähigkeiten werden Steuerungssysteme häufig in der Industrie, im Transportwesen, in der Energieversorgung, in medizinischen Geräten und in Alltagsgeräten eingesetzt.
Über uns
ALLELCO LIMITED
Weiterlesen
Schnelle Anfrage
Bitte senden Sie eine Anfrage, wir werden sofort antworten.
Häufig gestellte Fragen [FAQ]
1. Was ist der Unterschied zwischen einem Controller und einem Steuerungssystem?
Ein Controller ist nur das Entscheidungsgerät (wie eine SPS oder ein PID-Regler).Ein Steuerungssystem umfasst die Steuerung sowie Sensoren, Aktoren und den zu regelnden Prozess.
2. Was ist PID-Regelung und warum ist sie wichtig?
Die PID-Steuerung nutzt Proportional-, Integral- und Differentialfunktionen, um Fehler schnell und reibungslos zu minimieren.Es verbessert die Stabilität, Genauigkeit und Reaktionsgeschwindigkeit in den meisten Industriesystemen.
3. Warum oszillieren oder pendeln Steuerungssysteme manchmal?
Oszillationen treten auf, wenn Korrekturen zu aggressiv oder zu spät erfolgen.Schlechte Abstimmung, langsame Sensoren oder übermäßige Verstärkung führen dazu, dass der Ausgang wiederholt überschwingt.
4. Was ist Aktorsättigung?
Eine Sättigung des Aktors tritt auf, wenn der Aktor seine physikalische Grenze erreicht und die Leistung nicht weiter steigern kann.Dadurch wird verhindert, dass das System große Fehler korrigiert.
5. Wie gehen Steuerungssysteme mit Verzögerungen in Prozessen um?
Sie verwenden Optimierungsmethoden, Filter oder Vorhersagealgorithmen, um Verzögerungen auszugleichen, sodass die Korrektur zum richtigen Zeitpunkt erfolgt.

4,7-kΩ-Widerstandsleitfaden: Farbcode, Verwendung, Tests und Wertevergleich
auf 2026/02/16
Miniatur-Leistungsschalter (MCB): Funktionsprinzip, Typen, Nennwerte und Auswahlhilfe
auf 2026/02/15
Beliebte Beiträge
-

Komplexe Anweisungssatzcomputer: Wie verändert sie das Computer?
auf 8000/04/18 147770
-

USB-C-Pinout und Funktionen
auf 2000/04/18 112006
-

Verwenden von Xilinx Unified Simulation Primitive: Ein umfassender Leitfaden für FPGA -Design und -Simulation
auf 1600/04/18 111351
-

Stromversorgungsspannungen in der Elektronik: Bedeutung von VCC, VDD, VEE, VSS und GND
auf 0400/04/18 83768
-

RJ45 -Anschlusshandbuch: Pinbeleg, Kabeltypen und Verwendung
auf 1970/01/1 79565
-

Die ultimative Anleitung zu Farbcodes in modernen elektrischen Systemen
Die Art und Weise, wie unsere elektrischen Systeme Farben verwenden, gilt nicht nur für das Aussehen.Jede Drahtfarbe zeigt nun eine bestimmte Funktion an und erleichtert die Identifizierung und Ver...auf 1970/01/1 66960
-

Leitfaden für Spülventile: Funktion, Symptome, Test und Ersatz für eine optimale Motorleistung
Das Säuberventil ist ein wesentlicher Bestandteil eines Autosystems, mit dem die Luft sauber hält, indem sie Kraftstoffdämpfe verwalten, bevor sie in die Atmosphäre entkommen können.Dies hilft der ...auf 1970/01/1 63098
-

Qualität (q) Faktor: Gleichungen und Anwendungen
Der Qualitätsfaktor oder "Q" ist wichtig, wenn Sie überprüfen, wie gut Induktoren und Resonatoren in elektronischen Systemen funktionieren, die Funkfrequenzen (RF) verwenden.'Q' misst, wie gut ein ...auf 1970/01/1 63040
-

Erreichen der Spitzenleistung mit dem maximalen Stromübertragungssatz
Der maximale Stromübertragungssatz erklärt, wie Energie aus einer Quelle wie einer Batterie oder einem Generator zu einer angeschlossenen Last fließt.Es zeigt die genaue Bedingung, bei der die Last...auf 1970/01/1 54097
-

A23 Batteriespezifikationen und Kompatibilität
Die A23-Batterie ist eine kleine, zylinderförmige Batterie mit hoher Spannung.Auch 23A, 23Ae oder Mn21 genannt, läuft es mit 12 Volt und viel höher als AA- oder AAA -Batterien.Sein besonde...auf 1970/01/1 52184
Heiße Teilenummer
-

AD7511DIKQ
Analog Devices Inc.
IC SW SPST-NCX4 100OHM 16CERDIP
ATF20V8BQL-15PC
Microchip Technology
IC PLD 8MC 15NS 24DIP
MMA02040C1151FB300
Vishay Beyschlag/Draloric/BC Components
RES 1.15K OHM 1% 2/5W MELF 0204
P6SMB15A
Eaton - Electronics Division
TVS DIODE 12.8VWM 21.2VC SMB
PE-65861NLT
Pulse Electronics
XFRMR 1CT:2CT/1CT:2CT 1.2/1.2MH
SMA6L16A
Littelfuse Inc.
TVS DIODE 16VWM 26VC DO221AC
06035A681MAT2A
KYOCERA AVX
CAP CER 680PF 50V NP0 0603
AP7361-33FGE-7
Diodes Incorporated
IC REG LINEAR 3.3V 1A 8UDFN
SIP4282DVP3-T1GE3
Vishay Siliconix
IC PWR SWITCH P-CHAN 1:1 PWRPAK
PA0515.221NLT
Pulse Electronics
FIXED IND 225NH 35A 0.63MOHM SMD
IN80C188
Advanced Micro Devices
80C188 - 16-BIT MICROPROCESSOR
SMF14A
Yangzhou Yangjie Electronic Technology Co.,Ltd
TVS DIODE 14VWM 23.2VC SOD123FL
ICL3223IA
Intersil
IC TRANSCEIVER FULL 2/2 20SSOP
LP2981A-29DBVR
Texas Instruments
IC REG LINEAR 2.9V 100MA SOT23-5
MAX203EEWP+TG36
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 2/2 20SOIC
L401E3
Littelfuse Inc.
TRIAC SENS GATE 400V 1A TO92
SI2323DS-T1-E3
Vishay Siliconix
MOSFET P-CH 20V 3.7A SOT23-3
ATF22LV10CZ-25JC
Microchip Technology
IC PLD 10MC 25NS 28PLCC -

R1114Q321D-TR-FE
Nisshinbo Micro Devices Inc.
IC REG LINEAR 3.2V 150MA SC82AB
NFE61PT361B1H9L
Murata Electronics
FILTER LC(T) 360PF SMD
C1608X7S2A683M080AB
TDK Corporation
CAP CER 0.068UF 100V X7S 0603
T494C226K016AT
KEMET
CAP TANT 22UF 10% 16V 2312
S912XEQ512BCAA
NXP USA Inc.
IC MCU 16BIT 512KB FLASH 80QFP
C1608CH2A681J080AA
TDK Corporation
CAP CER 680PF 100V CH 0603
LT6222IGN#PBF
Analog Devices Inc.
IC OPAMP GP 4 CIRCUIT 16SSOP
MMBD1703A
Fairchild Semiconductor
RECTIFIER DIODE
AM26LS29PC
Advanced Micro Devices
SINGLE ENDED RS-423 LINE DRIVER
S-1172B36-U5T1G
ABLIC Inc.
IC REG LINEAR 3.6V 1A SOT89-5
WJLXT972ALC.A4-857341
Cortina Systems (Inphi)
IC TXRX ETHERNET 100MBPS 64LQFP
TRS208CDWR
Texas Instruments
IC TRANSCEIVER FULL 4/4 24SOIC
RT0402BRE0734RL
YAGEO
RES SMD 34 OHM 0.1% 1/16W 0402
GRM316C81C225KA12D
Murata Electronics
CAP CER 2.2UF 16V X6S 1206
TLV2401QDBVRQ1
Texas Instruments
IC OPAMP GP 1 CIRCUIT SOT23-5
AC0603KRX7R7BB473
YAGEO
CAP CER 0.047UF 16V X7R 0603
KX15-30KLDL-E1000E
JAE Electronics
CONN PLUG 30POS R/A SMD GOLD
UWX1A221MCL1GB
Nichicon
CAP ALUM 220UF 20% 10V SMD -
T520A476M004ATE070
KEMET
CAP TANT POLY 47UF 4V 1206
DG442CY
Analog Devices Inc./Maxim Integrated
IC SWITCH SPST-NOX4 85OHM 16SOIC
MLG0603S8N2JT000
TDK Corporation
FIXED IND 8.2NH 200MA 700MOHM SM
REF3240AIDBVR
Texas Instruments
IC VREF SERIES 0.2% SOT23-6
18121C474MAT2A
KYOCERA AVX
CAP CER 0.47UF 100V X7R 1812
BC239BTA
Fairchild Semiconductor
TRANS NPN 25V 0.1A TO92-3
HE3621A1210
Littelfuse Inc.
RELAY REED SPST 500MA 12V
OPA2137EA
Texas Instruments
IC OPAMP JFET 2 CIRCUIT 8VSSOP
NLV25T-101J-PF
TDK Corporation
FIXED IND 100UH 60MA 21 OHM SMD
MAX4008EUT+T
Analog Devices Inc./Maxim Integrated
IC CURRENT MONITOR 1% SOT6
1206CA181JAT1A
KYOCERA AVX
CAP CER 180PF 630V NP0 1206
MAX6358TZUT+T
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 2 CHANNEL SOT23-6
RT0402BRE0747RL
YAGEO
RES SMD 47 OHM 0.1% 1/16W 0402
C2012C0G2A122J060AA
TDK Corporation
CAP CER 1200PF 100V C0G 0805
10WQ045FN
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 45V 10A DPAK
MBR130LSFT1
onsemi
DIODE SCHOTTKY 30V 1A SOD123FL
IXTP18P10T
IXYS
MOSFET P-CH 100V 18A TO220AB
AT-31011-BLKG
Broadcom Limited
RF TRANS NPN 5.5V SOT143