Pulsweitenmodulation (PWM) erklärt
Pulsweitenmodulation (PWM) ist eine einfache und effiziente Möglichkeit, elektrische Energie mithilfe digitaler Signale zu steuern.Anstatt die Versorgungsspannung zu ändern, stellen Sie ein, wie lange das Signal in jedem Zyklus ein- und ausgeschaltet bleibt, um die Stromversorgung zu steuern.Dieser Artikel hilft Ihnen zu verstehen, wie PWM funktioniert, wie sich das Tastverhältnis auf die Ausgabe auswirkt und warum PWM in Elektronik- und Steuerungssystemen weit verbreitet ist.Außerdem erfahren Sie, wie PWM in Controllern, Wellenformtypen und Anwendungen angewendet wird.Katalog
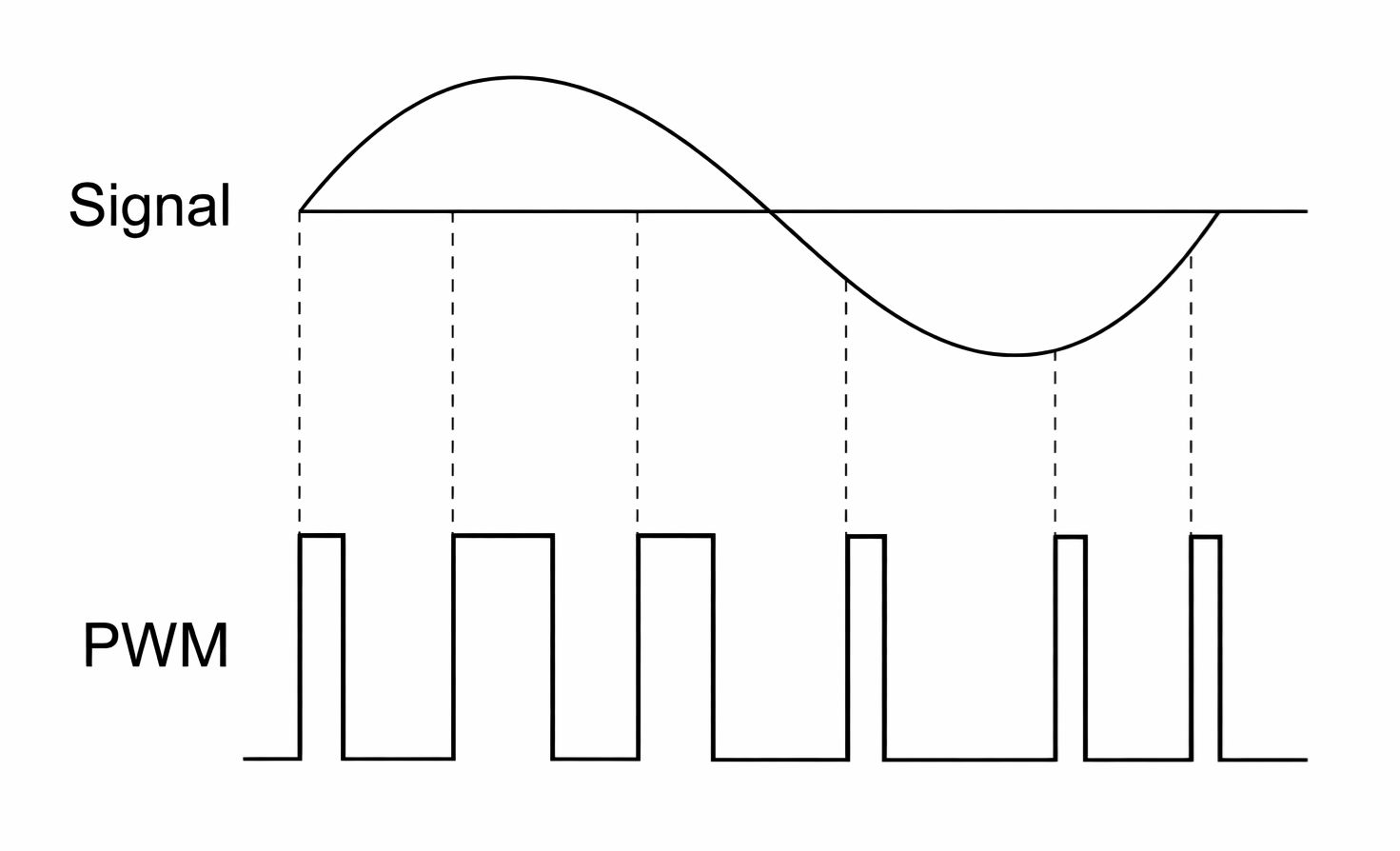
Abbildung 1. Konzept der Pulsweitenmodulation
Was ist Pulsweitenmodulation?
Pulsweitenmodulation (PWM) ist eine digitale Steuerungstechnik zur Regelung der an eine Last gelieferten elektrischen Leistung durch Variation des Anteils der Einschaltzeit innerhalb einer festen Schaltperiode.Anstatt den Versorgungsspannungspegel zu ändern, steuert PWM die effektive Leistung durch schnelles Umschalten des Signals zwischen vollständig EIN- und vollständig AUS-Zuständen.Dieser Ansatz ermöglicht eine effiziente Leistungsregelung mit minimalem Energieverlust, wodurch PWM weit verbreitet in Motorantrieben, LED-Steuerung, Leistungswandlern und eingebetteten Steuerungssystemen eingesetzt wird.
Wie funktioniert die Pulsweitenmodulation?
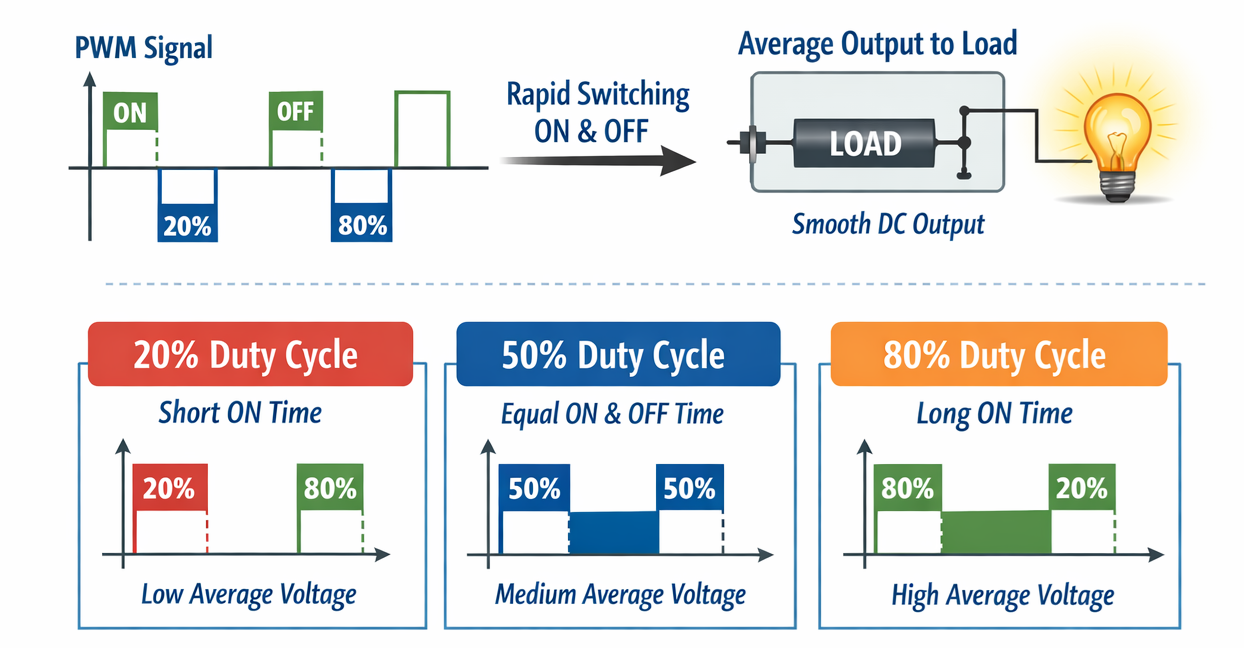
Abbildung 2. PWM-Funktionsprinzip
Bei der Pulsweitenmodulation wird das Ausgangssignal wiederholt mit einer konstanten Frequenz ein- und ausgeschaltet.Während jedes Schaltzyklus bleibt das Signal für eine bestimmte Dauer EIN und für den Rest des Zyklus AUS.Das Verhältnis der Einschaltzeit zur Gesamtzykluszeit wird als Arbeitszyklus bezeichnet und bestimmt direkt die durchschnittliche Spannung und den durchschnittlichen Strom, der an die Last geliefert wird.Ein höherer Arbeitszyklus erhöht die abgegebene Leistung, während ein niedrigerer Arbeitszyklus sie verringert.
Da die Schaltfrequenz typischerweise viel höher ist als die elektrische oder mechanische Reaktion der Last, reagiert die Last auf den Durchschnittswert des Signals und nicht auf einzelne Impulse.Dadurch ermöglicht PWM eine reibungslose und präzise Leistungssteuerung mithilfe digitaler Signale, ohne dass variable Spannungsquellen erforderlich sind.
Eigenschaften der PWM-Signalwellenform
|
PWM
Charakteristisch |
Beschreibung |
|
Impulsbreite |
Pünktlich
innerhalb eines PWM-Zyklus, von 0 Mikrosekunden bis zur vollen Periode. |
|
Arbeitszyklus |
Prozentsatz von
EIN-Zeit pro Zyklus, von 0 Prozent bis 100 Prozent. |
|
PWM-Frequenz |
Anzahl
Zyklen pro Sekunde, üblicherweise 500 Hz bis 100 kHz. |
|
PWM-Periode |
Gesamtzyklus
Zeit, typischerweise 1 Millisekunde bis 10 Mikrosekunden. |
|
Signal
Amplitude |
Spannungsniveau
des PWM-Signals, normalerweise 3,3 V, 5 V oder 12 V. |
|
Hochspannung
Ebene |
Spannung
im EIN-Zustand gleich der Versorgungsspannung. |
|
Niederspannung
Ebene |
Spannung
im AUS-Zustand typischerweise 0 V. |
|
Aufstiegszeit |
Zeit dazu
Wechsel von niedrig nach hoch, oft 10 ns bis 1 µs. |
|
Herbstzeit |
Zeit dazu
Wechsel von hoch nach niedrig, oft 10 ns bis 1 µs. |
|
Wechseln
Geschwindigkeit |
Höchstsatz
Zustandsänderung, unterstützt Hochfrequenz-PWM. |
|
Auflösung |
Anzahl
Arbeitsschritte, üblicherweise 8 Bit oder 10 Bit. |
|
Signal
Stabilität |
Konsistenz
von Frequenz und Arbeitszyklus über die Zeit. |
|
Nervosität |
Kleines Timing
Variation, normalerweise weniger als 1 Prozent. |
|
Tote Zeit |
Absichtlich
Verzögerung zwischen den Schaltvorgängen, typischerweise 100 ns bis 5 µs. |
|
Harmonische |
Hochfrequenz
Komponenten, die durch schnelles Schalten erzeugt werden. |
|
Leistungskontrolle |
Ausgangsleistung
variiert linear mit dem Arbeitszyklus. |
|
Antwort laden |
Fähigkeit dazu
Behalten Sie die Wellenform bei Laständerungen bei. |
|
Filtern
Ausgabe |
Gefiltertes PWM
erzeugt eine glatte Gleichspannung. |
|
Lärm
Immunität |
Widerstand gegen
Interferenzen werden durch saubere Kanten verbessert. |
Arten der Pulsweitenmodulation
Die Pulsweitenmodulation kann basierend auf der Form der Ausgangswellenform in verschiedene Steuerungsstrategien eingeteilt werden.Der Schwerpunkt dieser PWM-Typen liegt auf Modulationskonzepten und Steueralgorithmen, die sich auf die Ausgangsspannung, die harmonische Leistung und den Wirkungsgrad auswirken.
Einzelpulsbreitenmodulation (Einzelpuls-PWM)
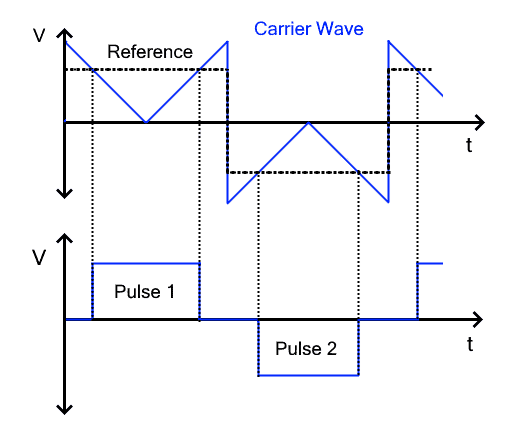
Abbildung 3. Einzelpuls-PWM-Wellenform
Single-Pulse-PWM verwendet einen Schaltimpuls pro Halbzyklus der Ausgangswellenform.Die Breite dieses einzelnen Impulses wird angepasst, um den Ausgangsspannungspegel zu steuern.Da pro Halbwelle nur ein Schaltereignis auftritt, bleiben die Schaltverluste gering.Diese Steuerungsstrategie erzeugt jedoch eine höhere harmonische Verzerrung und wird hauptsächlich in Niederfrequenz- und einfachen Leistungssteuerungsanwendungen verwendet, bei denen Einfachheit Vorrang vor Wellenformqualität hat.
Mehrpulsbreitenmodulation (Mehrpuls-PWM)
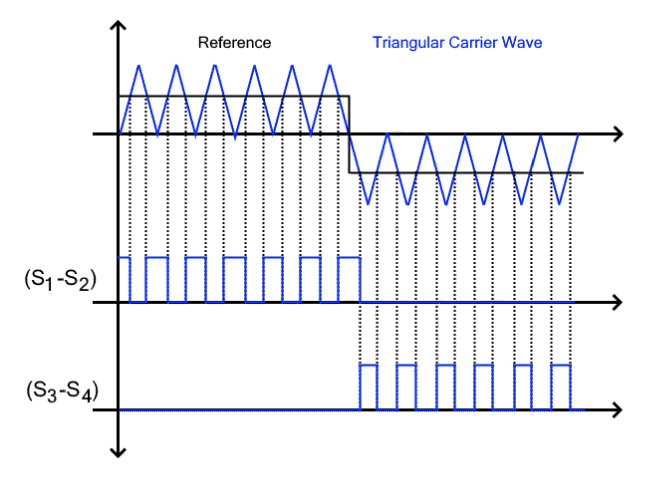
Abbildung 4. Mehrpuls-PWM-Wellenform
Multiple-Pulse-PWM unterteilt jeden Halbzyklus in mehrere kleinere Impulse anstelle eines einzelnen großen Impulses.Durch die Erhöhung der Anzahl der Impulse wird die harmonische Energie in Richtung höherer Frequenzen verteilt, wodurch die Qualität der Ausgangswellenform verbessert wird.Dieser PWM-Typ bietet ein Gleichgewicht zwischen reduzierter harmonischer Verzerrung und beherrschbaren Schaltverlusten und eignet sich daher für industrielle Leistungswandler und Motorantriebssysteme.
Sinusförmige Pulsweitenmodulation (SPWM)
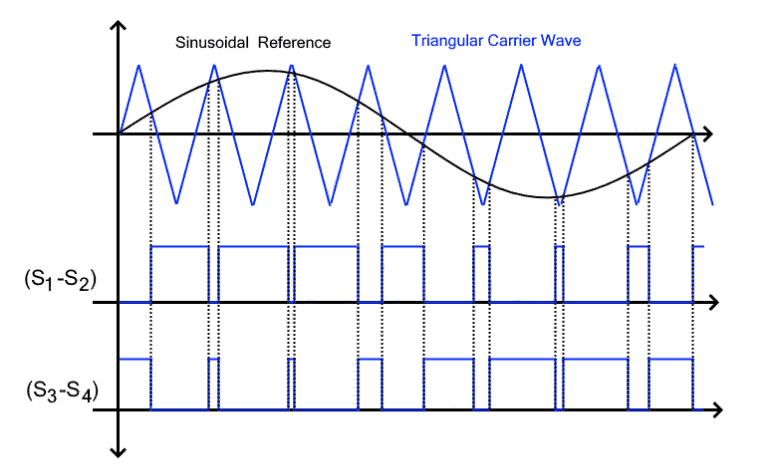
Abbildung 5. Sinusförmige PWM-Erzeugung
Sinusförmiges PWM ist eine Modulationsstrategie, die Impulse basierend auf einem sinusförmigen Referenzsignal erzeugt.Die Impulsbreiten variieren entsprechend der momentanen Amplitude der Referenzwellenform, sodass der Ausgang nach der Filterung annähernd einer Sinuswelle entspricht.SPWM wird häufig in Wechselrichtern, Motorantrieben und Systemen für erneuerbare Energien eingesetzt, da es eine gute harmonische Leistung bei mäßiger Steuerungskomplexität bietet.
Raumvektor-Pulsweitenmodulation (SVPWM)
Space Vector PWM ist eine fortschrittliche Steuerungsstrategie, die ein mathematisches Vektormodell des Wechselrichters anstelle eines direkten Wellenformvergleichs verwendet.Es wählt optimale Schaltzustände aus, um einen rotierenden Referenzvektor im Spannungsraum anzunähern.Im Vergleich zu SPWM verbessert SVPWM die Ausnutzung der DC-Busspannung und reduziert die harmonische Verzerrung weiter, wodurch es für leistungsstarke Motorantriebe und präzise industrielle Steuerungssysteme geeignet ist.
Methoden zur PWM-Erzeugung
PWM-Signale können auch danach kategorisiert werden, wie die Impulse in der Hardware erzeugt und ausgerichtet werden.Diese Methoden zur PWM-Erzeugung konzentrieren sich auf den Timerbetrieb, die Schaltsymmetrie und die Pulsplatzierung und nicht auf die Modulationsstrategie selbst.
Single-Edge-PWM (Edge-Aligned-PWM)
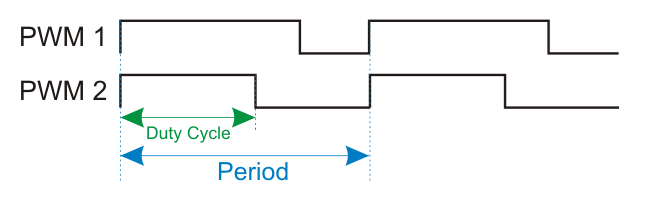
Abbildung 6. Kantenausgerichtetes PWM-Timing
Single-Edge-PWM richtet alle Impulse auf eine Flanke der Schaltperiode aus, typischerweise die ansteigende Flanke.Das Tastverhältnis wird durch Verlängern oder Verkürzen des Impulses ab dieser festen Flanke angepasst.Diese Erzeugungsmethode ist mithilfe von Hardware-Timern und Komparatoren einfach zu implementieren, ihr asymmetrisches Schaltmuster kann jedoch zu harmonischen Verzerrungen und elektromagnetischen Störungen führen.
Double-Edge-PWM (Center-Aligned-PWM)
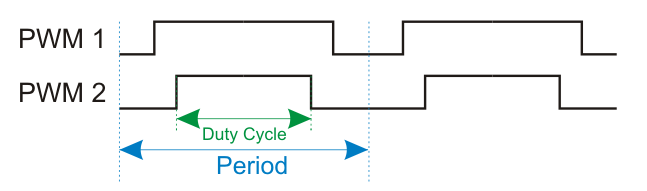
Abbildung 7. Mittig ausgerichtetes PWM-Timing
Double-Edge-PWM zentriert den Impuls innerhalb der Schaltperiode, indem es symmetrisch um den Mittelpunkt ein- und ausschaltet.Dieses symmetrische Timing reduziert harmonische Verzerrungen und elektromagnetische Störungen und verbessert gleichzeitig die Strombalance.Aufgrund dieser Vorteile wird zentriert ausgerichtetes PWM häufig in Präzisionsmotorantrieben und leistungsstarken Leistungssteuerungsanwendungen verwendet.
Trägerbasiertes PWM (Komparator-PWM)
Trägerbasiertes PWM erzeugt Impulse durch den Vergleich eines Referenzsignals mit einer hochfrequenten Trägerwellenform mithilfe eines Komparators.Wenn der Referenzwert den Träger überschreitet, schaltet der Ausgang EIN.Diese Methode dient als Hardware-Generierungsgrundlage für viele PWM-Steuerungsstrategien, einschließlich SPWM, und ist in Mikrocontrollern, DSPs und Industriesteuerungen weit verbreitet.
PWM in Mikrocontrollern und Controllern
Pulsweitenmodulation in Arduino
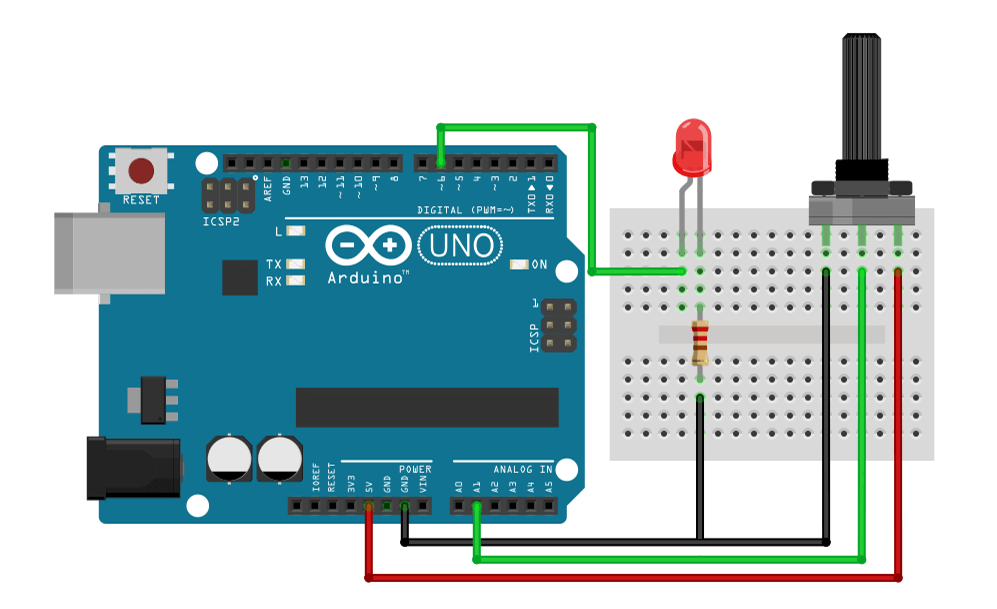
Abbildung 8. Arduino-PWM-LED-Steuerung
Arduino erzeugt eine Pulsweitenmodulation mithilfe interner Hardware-Timer, die den Ausgangspin zwischen den Zuständen HIGH und LOW umschalten.Der Arbeitszyklus wird über eine Software angepasst, die direkt die an die Last gelieferte durchschnittliche Spannung steuert.Durch Ändern des Arbeitszyklus kann Arduino die LED-Helligkeit oder Motorgeschwindigkeit stufenlos variieren, ohne die Versorgungsspannung zu ändern.Die PWM-Frequenz wird in der Regel durch die Timer-Einstellungen festgelegt, um einen stabilen Betrieb bei Steuerungsaufgaben zu gewährleisten.Wie in der Abbildung dargestellt, treibt der Arduino-PWM-Pin eine LED über einen Widerstand an und zeigt deutlich, wie sich die Variation des Arbeitszyklus auf die sichtbare Helligkeit ändert.
Pulsweitenmodulation in ESP32
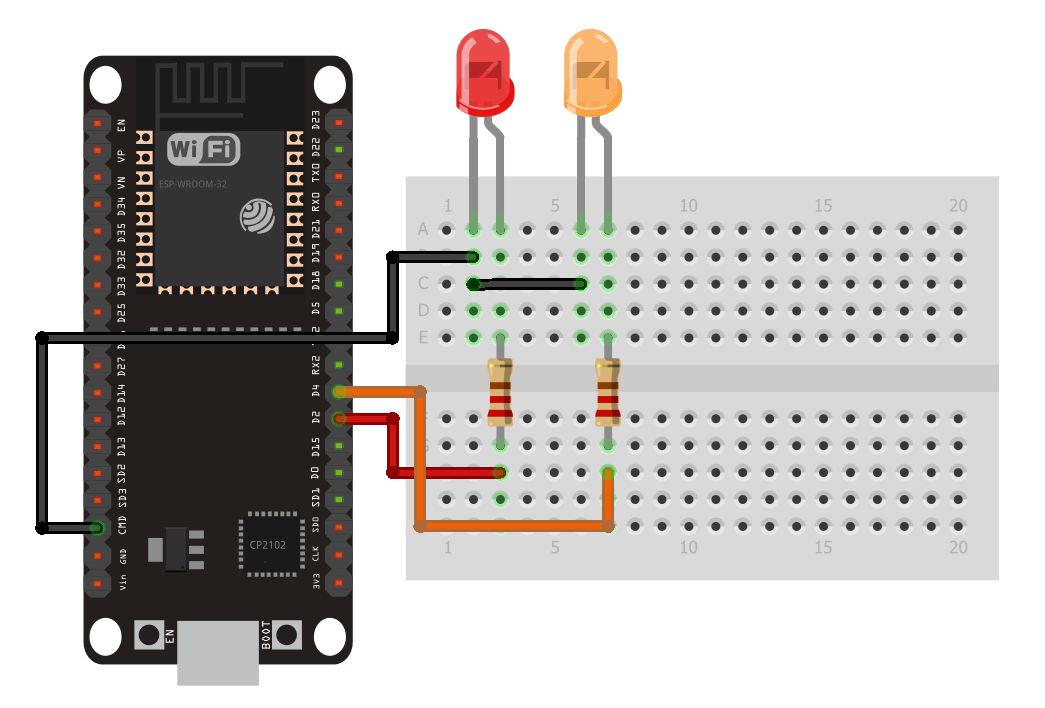
Abbildung 9. Beispiel für einen ESP32-PWM-Ausgang
ESP32 bietet erweiterte Pulsweitenmodulation mithilfe dedizierter PWM-Hardwaremodule.Es unterstützt eine höhere Auflösung, mehrere unabhängige PWM-Kanäle und eine flexible Frequenzsteuerung, ohne die CPU zu belasten.Dies ermöglicht eine präzise und reaktionsschnelle Leistungssteuerung für Motoren, LEDs und IoT-Geräte.ESP32 PWM eignet sich besonders für Anwendungen, die eine schnelle Reaktion und eine genaue Ausgangsregelung erfordern.Abbildung 9 zeigt, wie der ESP32 mehrere LEDs mit unterschiedlichen PWM-Arbeitszyklen steuert und veranschaulicht, wie jeder Kanal die Ausgangsleistung unabhängig anpasst.
Pulsweitenmodulation in SPS
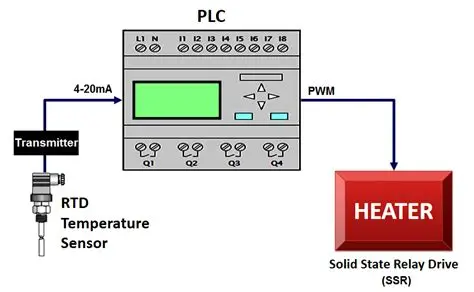
Abbildung 10. PLC-PWM-Heizungssteuerung
SPS nutzen Pulsweitenmodulation, um industrielle Lasten wie Heizungen, Motoren und Aktoren mit hoher Zuverlässigkeit zu steuern.Der PWM-Ausgang wird basierend auf Sensorrückmeldungen oder programmierter Steuerlogik angepasst, um die Leistung genau zu regeln.Diese Methode ermöglicht eine reibungslose Steuerung und minimiert gleichzeitig die elektrische Belastung der Schaltgeräte.SPS-basiertes PWM ist für den zuverlässigen Betrieb in elektrisch verrauschten und rauen Industrieumgebungen ausgelegt.Wie in der Abbildung dargestellt, verwendet die SPS ein PWM-Signal, um ein Halbleiterrelais anzusteuern, das die Heizleistung basierend auf der Temperaturrückmeldung steuert.
Anwendungen der Pulsweitenmodulation
Die Pulsweitenmodulation wird häufig zur effizienten und präzisen Leistungssteuerung sowohl in elektronischen Anwendungen mit geringer als auch hoher Leistung eingesetzt.
1. Motorgeschwindigkeitsregelung
PWM wird üblicherweise in Gleichstrommotoren, Servomotoren und BLDC-Motorantrieben verwendet, um Geschwindigkeit und Drehmoment durch Variation der dem Motor zugeführten durchschnittlichen Spannung zu steuern.Diese Methode sorgt für eine reibungslose Geschwindigkeitsregelung und hohe Effizienz in der Robotik, Industrieautomation und Elektrofahrzeugen.
2. LED-Dimmung und Lichtsteuerung
Bei LED-Treibern steuert PWM die Helligkeit durch schnelles Ein- und Ausschalten der LED unter Beibehaltung eines konstanten Stromniveaus.Dies verhindert Farbverschiebungen, verbessert die Effizienz und ermöglicht eine präzise Helligkeitsanpassung in Displays, Automobilbeleuchtung und intelligenten Beleuchtungssystemen.
3. Netzteile und Spannungsregelung
PWM ist eine Kerntechnik in Schaltnetzteilen, DC-DC-Wandlern und Wechselrichtern.Es trägt dazu bei, Ausgangsspannung und -strom effizient zu regulieren und reduziert die Wärmeentwicklung im Vergleich zu Linearreglern.
4. Audiosignalerzeugung
PWM wird in Audioverstärkern der Klasse D verwendet, um Audiosignale in hochfrequente Schaltsignale umzuwandeln.Dies ermöglicht eine leistungsstarke Audioverstärkung mit geringem Leistungsverlust und einem kompakten Schaltungsdesign.
5. Heizung und Temperaturregelung
PWM steuert die an Heizungen, Heizelemente und Temperaturkontrollsysteme gelieferte Leistung durch Anpassen der Ein-Aus-Zeit der Versorgung.Dies sorgt für eine stabile Temperaturregelung in Industrieheizungen, Lötstationen und Haushaltsgeräten.
6. Batterieladung und Energiemanagement
PWM wird in Batterieladegeräten und Solarladereglern eingesetzt, um Ladestrom und -spannung zu steuern.Dies verbessert die Ladeeffizienz, schützt die Batterien vor Überladung und verlängert die Batterielebensdauer.
7. Mikrocontroller und eingebettete Systeme
PWM-Ausgänge von Mikrocontrollern werden häufig zur Erzeugung analoger Signale, zur Steuerung von Aktoren und zur Schnittstelle mit externen Geräten verwendet.Dies macht PWM in eingebetteten Systemen, IoT-Geräten und Steuerungsanwendungen wichtig.
PWM vs. lineare Steuerung vs. Phasenwinkelsteuerung
|
Parameter |
PWM
Kontrolle |
Linear
Kontrolle |
Phase
Winkelkontrolle |
|
Grundlegende Kontrolle
Methode
|
Ausgabe ist
gesteuert durch unterschiedliche Einschaltdauer |
Ausgabe ist
gesteuert durch linearen Spannungsabfall |
Ausgabe ist
gesteuert durch Verzögerung der AC-Wellenformleitung |
|
Typisches Angebot
Typ |
Gleichstrom
Versorgung |
Gleichstrom
Versorgung |
Wechselstrom
Versorgung |
|
Steuersignal
Häufigkeit |
Im Allgemeinen 1
kHz bis 100 kHz |
Null
Schaltfrequenz |
Linie
Frequenz von 50 Hz oder 60 Hz |
|
Energieeffizienz |
Effizienz
typischerweise 85 bis 98 Prozent |
Effizienz
typischerweise 30 bis 60 Prozent |
Effizienz
typischerweise 70 bis 90 Prozent |
|
Wärmeerzeugung |
Wärmeverlust ist
aufgrund des Schaltvorgangs gering |
Wärmeverlust ist
hoch wegen Spannungsabfall |
Wärmeverlust ist
mäßig während der teilweisen Leitung |
|
Ausgangsspannung
Verordnung |
Durchschnittlich
Die Spannung wird durch das Tastverhältnis gesteuert |
Ausgabe
Die Spannung folgt direkt dem Steuereingang |
RMS-Spannung
variiert je nach Schusswinkel |
|
Kontrollauflösung |
Hoch
Auflösung mit digitalen Zeitschaltuhren |
Sehr hoch
Auflösung mit analoger Steuerung |
Mittel
Auflösung durch AC-Wellenform begrenzt |
|
Schaltungskomplexität |
Mittel
Komplexität mit Schaltkomponenten |
Einfach
Schaltung mit Passelement |
Mittel
Komplexität mittels TRIAC oder SCR |
|
EMI und Rauschen
Ebene |
EMI ist
mittel bis hoch ohne Filterung |
EMI ist sehr
niedrig |
EMI ist hoch
aufgrund von Wellenformverzerrungen |
|
Typischer Wechsel
Gerät |
MOSFET bzw
IGBT |
BJT oder linear
Regler |
TRIAC oder SCR |
|
Reaktionsgeschwindigkeit |
Reaktionszeit
ist in Mikrosekunden |
Reaktionszeit
ist in Millisekunden |
Reaktionszeit
hängt vom AC-Nulldurchgang ab |
|
Kompatibilität laden |
Am besten für
Motoren, LEDs und Stromwandler |
Am besten für niedrig
analoge Lasten mit Strom versorgen |
Am besten für
Lampenheizungen und Wechselstrommotoren |
|
Nennleistungsbereich |
Ab 1 Watt
bis zu mehreren Kilowatt |
Normalerweise unten
50 Watt |
Gewöhnlich von
100 Watt bis mehrere Kilowatt |
|
Kontrollgenauigkeit |
Genauigkeit
hängt von der Timer-Auflösung ab |
Sehr genau
und reibungslose Steuerung |
Genauigkeit
von Schwankungen der Netzspannung beeinflusst |
|
Allgemeine Anwendungen |
Motorgeschwindigkeit
Steuerung der SMPS-LED-Dimmung |
Audio
Verstärker-Sensorschaltungen |
Lichtdimmer
Lüfterregler, Heizungssteuerung |
Fazit
Die Pulsweitenmodulation ermöglicht eine effiziente und genaue Leistungssteuerung durch Variation des Arbeitszyklus eines Schaltsignals.Verschiedene PWM-Typen und Erzeugungsmethoden wirken sich auf die Qualität, Effizienz und Systemleistung der Wellenform aus.PWM wird häufig in Mikrocontrollern, SPS und Leistungselektronik für Motoren, Beleuchtung, Stromumwandlung und Temperaturregelung eingesetzt.Aufgrund seiner Einfachheit und Effizienz ist es in modernen elektronischen Anwendungen unverzichtbar.
Über uns
ALLELCO LIMITED
Weiterlesen
Schnelle Anfrage
Bitte senden Sie eine Anfrage, wir werden sofort antworten.
Häufig gestellte Fragen [FAQ]
1. Kann PWM bei falscher Anwendung Motoren oder LEDs beschädigen?
Ja, falsche PWM-Einstellungen wie sehr hohe Frequenz, schlechte Filterung oder falsche Treiberauswahl können zu Überhitzung, Rauschen oder einer verkürzten Lebensdauer führen.Die Verwendung der richtigen PWM-Frequenz und der richtigen Treiberschaltungen verhindert Schäden.
2. Welche PWM-Frequenz eignet sich am besten für Motoren, LEDs und Heizungen?
Motoren verwenden typischerweise PWM-Frequenzen zwischen 1 kHz und 20 kHz, LEDs verwenden häufig 500 Hz bis 5 kHz und Heizungen können sehr niedrige Frequenzen wie 1 Hz bis 100 Hz verwenden.Die ideale Frequenz hängt von der Lastart und Anwendung ab.
3. Benötige ich einen Filter, wenn ich PWM für analoge Signale verwende?
Ja, ein Tiefpassfilter wird empfohlen, wenn PWM zur Erzeugung analogähnlicher Spannungen verwendet wird.Die Filterung glättet die PWM-Wellenform und reduziert die Welligkeit, sodass sie für empfindliche Schaltkreise geeignet ist.
4. Welche Komponenten werden zum Aufbau einer PWM-Steuerschaltung benötigt?
Ein einfaches PWM-System erfordert einen Controller, ein Schaltgerät, eine Treiberschaltung, eine Stromversorgung und eine Last.Je nach Leistungsniveau können zusätzliche Komponenten wie Filter, Schutzschaltungen und Kühlkörper erforderlich sein.
5. Verursacht PWM elektrisches Rauschen oder Interferenzen?
Bei unsachgemäßer Auslegung kann die PWM-Schaltung zu elektromagnetischen Störungen führen.Die Verwendung von Abschirmung, Filterung, ordnungsgemäßer Erdung und korrekter Schaltfrequenz trägt zur Reduzierung von Rauschproblemen bei.

Technische Übersicht über den Dual-Operationsverstärker AD8542AR
auf 2026/01/13
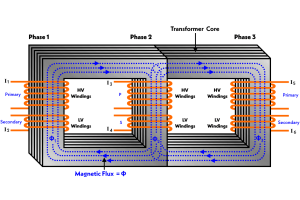
Vor- und Nachteile von dreiphasigen Transformatoranschlüssen
auf 2026/01/12
Beliebte Beiträge
-

Komplexe Anweisungssatzcomputer: Wie verändert sie das Computer?
auf 8000/04/18 147758
-

USB-C-Pinout und Funktionen
auf 2000/04/18 111938
-

Verwenden von Xilinx Unified Simulation Primitive: Ein umfassender Leitfaden für FPGA -Design und -Simulation
auf 1600/04/18 111349
-

Stromversorgungsspannungen in der Elektronik: Bedeutung von VCC, VDD, VEE, VSS und GND
auf 0400/04/18 83721
-

RJ45 -Anschlusshandbuch: Pinbeleg, Kabeltypen und Verwendung
auf 1970/01/1 79508
-

Die ultimative Anleitung zu Farbcodes in modernen elektrischen Systemen
Die Art und Weise, wie unsere elektrischen Systeme Farben verwenden, gilt nicht nur für das Aussehen.Jede Drahtfarbe zeigt nun eine bestimmte Funktion an und erleichtert die Identifizierung und Ver...auf 1970/01/1 66914
-

Leitfaden für Spülventile: Funktion, Symptome, Test und Ersatz für eine optimale Motorleistung
Das Säuberventil ist ein wesentlicher Bestandteil eines Autosystems, mit dem die Luft sauber hält, indem sie Kraftstoffdämpfe verwalten, bevor sie in die Atmosphäre entkommen können.Dies hilft der ...auf 1970/01/1 63061
-

Qualität (q) Faktor: Gleichungen und Anwendungen
Der Qualitätsfaktor oder "Q" ist wichtig, wenn Sie überprüfen, wie gut Induktoren und Resonatoren in elektronischen Systemen funktionieren, die Funkfrequenzen (RF) verwenden.'Q' misst, wie gut ein ...auf 1970/01/1 63012
-

Erreichen der Spitzenleistung mit dem maximalen Stromübertragungssatz
Der maximale Stromübertragungssatz erklärt, wie Energie aus einer Quelle wie einer Batterie oder einem Generator zu einer angeschlossenen Last fließt.Es zeigt die genaue Bedingung, bei der die Last...auf 1970/01/1 54081
-

A23 Batteriespezifikationen und Kompatibilität
Die A23-Batterie ist eine kleine, zylinderförmige Batterie mit hoher Spannung.Auch 23A, 23Ae oder Mn21 genannt, läuft es mit 12 Volt und viel höher als AA- oder AAA -Batterien.Sein besonde...auf 1970/01/1 52131
Heiße Teilenummer
-

RLD03N06CLESM
Harris Corporation
N-CHANNEL POWER MOSFET
MAX4619EUE
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 3 10OHM 16TSSOP
MSP430F5325IPN
Texas Instruments
IC MCU 16BIT 64KB FLASH 80LQFP
SI7113ADN-T1-GE3
Vishay Siliconix
MOSFET P-CH 100V 10.8A PPAK
TMS320F28379SZWTT
Texas Instruments
IC MCU 32BIT 1MB FLASH 337NFBGA
MMBF4393LT1G
onsemi
JFET N-CH 30V SOT23-3
NOJE337M006RWJ
KYOCERA AVX
CAP NIOB OXI 330UF 20% 6.3V 2917
PBSS5350X,135
Nexperia USA Inc.
TRANS PNP 50V 3A SOT89
CL10C5R1CB8NNNC
Samsung Electro-Mechanics
CAP CER 5.1PF 50V C0G/NP0 0603
FDS6680
onsemi
MOSFET N-CH 30V 11.5A 8SOIC
74HC164D14
Diodes Incorporated
IC SHIFT REGISTER SER 14DIP
HMC438MS8GE
Analog Devices Inc.
IC FREQ DIVIDER DC-7GHZ 8MSOP
FT24C64A-ELR-T
Fremont Micro Devices Ltd
IC EEPROM 64KBIT I2C SOT23-5
0805YA120JAT2A
KYOCERA AVX
CAP CER 12PF 16V NP0 0805
ONET1191PRGTT
Texas Instruments
IC LIMITING AMP 16QFN
ELM3043(TA)
Everlight Electronics Co Ltd
OPTOISOLATOR 3.75KV TRIAC 4SMD
JANTX1N6466
Microchip Technology
TVS DIODE 30.5VWM 47.5VC AXIAL
TNY264PG
Power Integrations
IC OFFLINE SWITCH FLYBACK 8DIP -

MPC857DSLZQ50B
Freescale Semiconductor
POWERQUICC RISC MICROPROCESSOR
ONET8501VRGPT
Texas Instruments
IC LASER DRVR 11.3GB 3.6V 20QFN
MAX7443ESA+T
Analog Devices Inc./Maxim Integrated
IC FILTER 27MHZ LOW PASS 8SOIC
PM5422D-FGI
Microchip Technology
IC ETHERNET PCI META 20G
LTC4380IMS-4#PBF
Analog Devices Inc.
IC LOW CUR SURGE STOPPER 10MSOP
V300B24T250B
Vicor Corporation
DC DC CONVERTER 24V 250W
LM3743MM-1000
Texas Instruments
IC REG CTRLR BUCK 10MSOP
EP3SL150F1152C2N
Intel
IC FPGA 744 I/O 1152FBGA
GRM0336S1E3R6CD01D
Murata Electronics
CAP CER 3.6PF 25V S2H 0201
STPS3H100AF
STMicroelectronics
DIODE SCHOTT 100V 3A SOD128FLAT
ATMEGA2560V-8AU
Atmel
IC MCU 8BIT 256KB FLASH 100TQFP
SMBJ12A
Meritek
TVS DIODE 12VWM 19.9VC
FAN7314AMX
onsemi
IC INVERTER DVR LCD BKLT 20SOIC
SMAJ51-E3/61
Vishay General Semiconductor - Diodes Division
TVS DIODE 51VWM 91.1VC DO214AC
WW12XR430FTL
Walsin Technology Corporation
RES 0.43 OHM 1% 1/4W 1206
LM77CIMMX-3
Texas Instruments
SENSOR DIGITAL -55C-125C 8VSSOP
MAX3645EEE+T
Analog Devices Inc./Maxim Integrated
IC LIMITING AMP 16QSOP
R5F104BCAFP#10
Renesas Electronics America Inc
IC MCU 16BIT 32KB FLASH 32LQFP -

DAC8420ESZ
Analog Devices Inc.
IC DAC 12BIT V-OUT 16SOIC
AU1PGHM3/84A
Vishay General Semiconductor - Diodes Division
DIODE AVALANCHE 400V 1A DO220AA
SI8661ED-B-ISR
Skyworks Solutions Inc.
DGTL ISO 5000VRMS 6CH GP 16SOIC
CL05F103ZB5NNNC
Samsung Electro-Mechanics
CAP CER 10000PF 50V Y5V 0402
OPA2237EA/2K5
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8VSSOP
QMK212B7222KDHT
Taiyo Yuden
CAP CER 2200PF 250V X7R 0805
PIC12F508-I/MS
Microchip Technology
IC MCU 8BIT 768B FLASH 8MSOP
ZXTN19100CFFTA
Diodes Incorporated
TRANS NPN 100V 4.5A SOT23F
TSOP57338TT1
Vishay Semiconductor Opto Division
SENSOR REMOTE REC 38.0KHZ 40M
12067A101MAT2A
KYOCERA AVX
CAP CER 100PF 500V NP0 1206
SN75154DR
Texas Instruments
IC RECEIVER 0/4 16SOIC
L6385D013TR
STMicroelectronics
IC GATE DRVR HALF-BRIDGE 8SO
MMBT2907AQ-7-F
Diodes Incorporated
GENERAL PURPOSE TRANSISTOR SOT23
DDTC114TCA-7
Diodes Incorporated
TRANS PREBIAS NPN 200MW SOT23-3
TPS3307-33DGNR
Texas Instruments
IC SUPERVISOR 3 CHANNEL 8MSOP
SP232ECN-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 2/2 16SOIC
ADUC7039BCP6Z-RL
Analog Devices Inc.
IC MCU 16/32B 64KB FLASH 32LFCSP
LTC3630EMSE#TRPBF
Analog Devices Inc.
IC REG BCK ADJ/PROG 500MA 16MSOP